
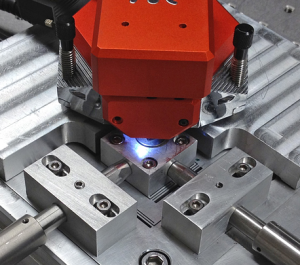
Scanning probe microscopes utilize functionalized probes to image samples with sub-atomic resolution. New mechanical designs, imaging modes, and control techniques are being developed to improve the speed, fidelity, and functionality in end-user applications such as biological assay.
Books
A. J. Fleming; K. K. Leang
Design, Modeling and Control of Nanopositioning Systems Book
Springer, London, UK, 2014, ISBN: 978-3319066165.
@book{B14,
title = {Design, Modeling and Control of Nanopositioning Systems},
author = {A. J. Fleming and K. K. Leang},
url = {http://www.amazon.com/Modeling-Control-Nanopositioning-Advances-Industrial/dp/3319066161 },
isbn = {978-3319066165},
year = {2014},
date = {2014-12-30},
publisher = {Springer},
address = {London, UK},
abstract = {Covering the complete design cycle of nanopositioning systems, this is the first comprehensive text on the topic. The book first introduces concepts associated with nanopositioning stages and outlines their application in such tasks as scanning probe microscopy, nanofabrication, data storage, cell surgery and precision optics. Piezoelectric transducers, employed ubiquitously in nanopositioning applications are then discussed in detail including practical considerations and constraints on transducer response. The reader is then given an overview of the types of nanopositioner before the text turns to the in-depth coverage of mechanical design including flexures, materials, manufacturing techniques, and electronics. This process is illustrated by the example of a high-speed serial-kinematic nanopositioner. Position sensors are then catalogued and described and the text then focuses on control.
Several forms of control are treated: shunt control, feedback control, force feedback control and feedforward control (including an appreciation of iterative learning control). Performance issues are given importance as are problems limiting that performance such as hysteresis and noise which arise in the treatment of control and are then given chapter-length attention in their own right. The reader also learns about cost functions and other issues involved in command shaping, charge drives and electrical considerations. All concepts are demonstrated experimentally including by direct application to atomic force microscope imaging.
Design, Modeling and Control of Nanopositioning Systems will be of interest to researchers in mechatronics generally and in control applied to atomic force microscopy and other nanopositioning applications. Microscope developers and mechanical designers of nanopositioning devices will find the text essential reading.},
keywords = {},
pubstate = {published},
tppubtype = {book}
}
Several forms of control are treated: shunt control, feedback control, force feedback control and feedforward control (including an appreciation of iterative learning control). Performance issues are given importance as are problems limiting that performance such as hysteresis and noise which arise in the treatment of control and are then given chapter-length attention in their own right. The reader also learns about cost functions and other issues involved in command shaping, charge drives and electrical considerations. All concepts are demonstrated experimentally including by direct application to atomic force microscope imaging.
Design, Modeling and Control of Nanopositioning Systems will be of interest to researchers in mechatronics generally and in control applied to atomic force microscopy and other nanopositioning applications. Microscope developers and mechanical designers of nanopositioning devices will find the text essential reading.
Journal Articles
L. McCourt; M. G. Ruppert; B. S. Routley; S. Indirathankam; A. J. Fleming
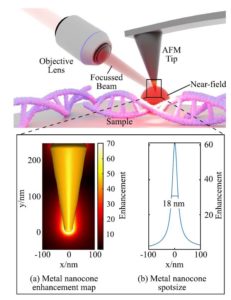
A comparison of gold and silver nanocones and geometry optimisation for tip-enhanced microscopy Journal Article
In: Journal of Raman Spectroscopy, vol. 51, iss. 11, pp. 2208-2216, 2020.
@article{McCourt2020,
title = {A comparison of gold and silver nanocones and geometry optimisation for tip-enhanced microscopy},
author = {L. McCourt and M. G. Ruppert and B. S. Routley and S. Indirathankam and A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2020/09/J20e.pdf},
doi = {https://doi.org/10.1002/jrs.5987},
year = {2020},
date = {2020-11-01},
urldate = {2020-08-24},
journal = {Journal of Raman Spectroscopy},
volume = {51},
issue = {11},
pages = {2208-2216},
abstract = {In this article, boundary element method simulations are used to optimise the geometry of silver and gold nanocone probes to maximise the localised electric field enhancement and tune the near-field resonance wavelength. These objectives are expected to maximise the sensitivity of tip-enhanced Raman microscopes. Similar studies have used limited parameter sets or used a performance metric other than localised electric field enhancement. In this article, the optical responses for a range of nanocone geometries are simulated for excitation wavelengths ranging from 400 to 1000 nm. Performance is evaluated by measuring the electric field enhancement at the sample surface with a resonant illumination wavelength. These results are then used to determine empirical models and derive optimal nanocone geometries for a particular illumination wavelength and tip material. This article concludes that gold nanocones are expected to provide similar performance to silver nanocones at red and nearinfrared wavelengths, which is consistent with other results in the literature. In this article, 633 nm is determined to be the shortest usable illumination wavelength for gold nanocones. Below this limit, silver nanocones will provide superior enhancement. The use of gold nanocone probes is expected to dramatically improve probe lifetime, which is currently measured in hours for silver coated probes. Furthermore, the elimination of passivation coatings is expected to enable smaller probe radii and improved topographical resolution.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
S. I. Moore; M. G. Ruppert; Y. K. Yong
AFM Cantilever Design for Multimode Q Control: Arbitrary Placement of Higher-Order Modes Journal Article
In: IEEE/ASME Transactions on Mechatronics, pp. 1-6, 2020, (This work was supported by the Australian Research Council Discovery Project DP170101813).
@article{Moore2020,
title = {AFM Cantilever Design for Multimode Q Control: Arbitrary Placement of Higher-Order Modes},
author = {S. I. Moore and M. G. Ruppert and Y. K. Yong},
url = {https://ieeexplore.ieee.org/document/9006926},
doi = {10.1109/TMECH.2020.2975627},
year = {2020},
date = {2020-02-21},
urldate = {2020-02-21},
journal = { IEEE/ASME Transactions on Mechatronics},
pages = {1-6},
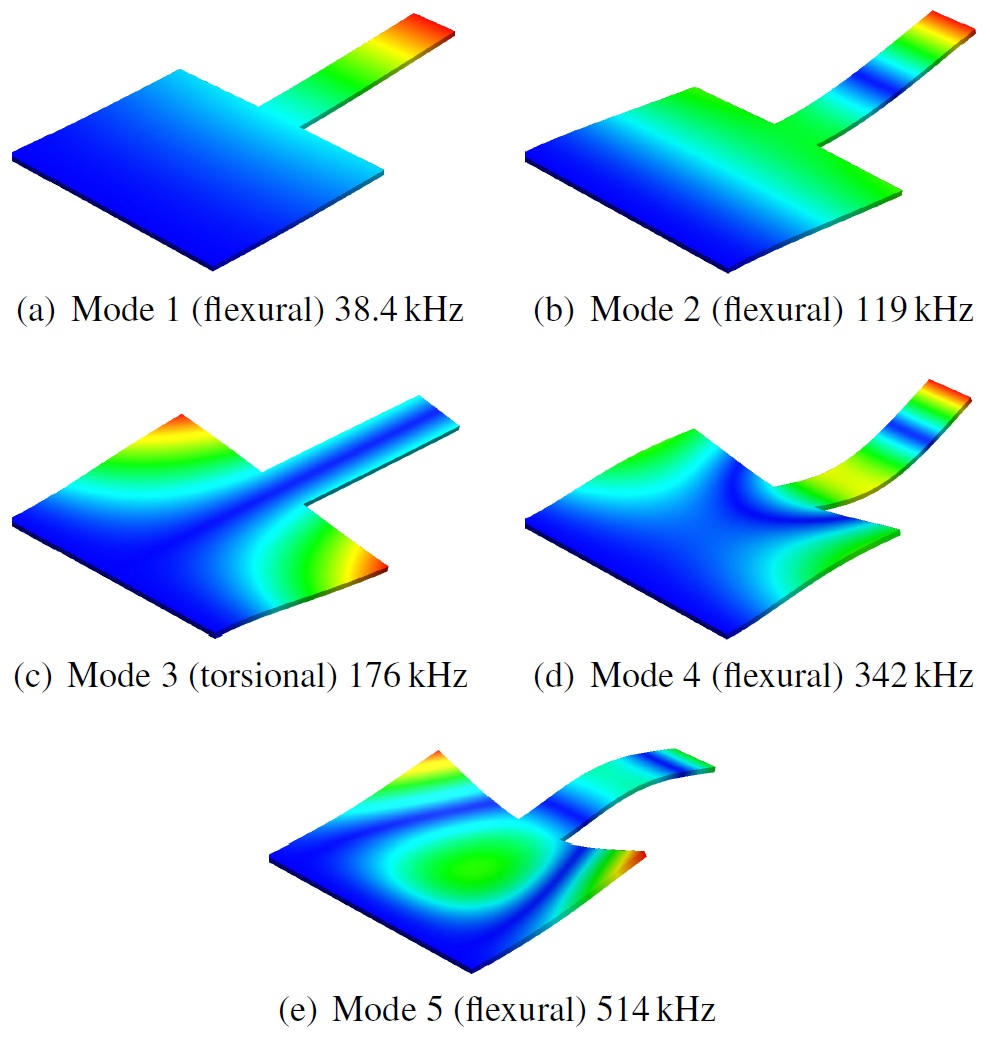
abstract = {In the fast growing field of multifrequency atomic force microscopy (AFM), the benefits of using higher-order modes has been extensively reported on. However, higher modes of AFM cantilevers are difficult to instrument and Q control is challenging owing to their high frequency nature. At these high frequencies, the latencies in the computations and analog conversions of digital signal processing platforms become significant and limit the effective bandwidth of digital feedback controller implementations. To address this issue, this article presents a novel cantilever design for which the first five modes are placed within a 200 kHz bandwidth. The proposed cantilever is designed using a structural optimization routine. The close spacing and low mechanical bandwidth of the resulting cantilever allows for the implementation of Q controllers for all five modes using a standard FPGA development board for bimodal AFM and imaging on higher-order modes.},
note = {This work was supported by the Australian Research Council Discovery Project DP170101813},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
D. M. Harcombe; M. G. Ruppert; A. J. Fleming
A review of demodulation techniques for multifrequency atomic force microscopy Journal Article
In: Beilstein Journal of Nanotechnology, vol. 11, pp. 76-97, 2020, ISSN: 21904286.
@article{Harcombe2020,
title = {A review of demodulation techniques for multifrequency atomic force microscopy},
author = {D. M. Harcombe and M. G. Ruppert and A. J. Fleming},
editor = {T. Glatzel},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2020/02/J20b-reducedSize.pdf},
doi = {doi:10.3762/bjnano.11.8},
issn = {21904286},
year = {2020},
date = {2020-01-07},
journal = {Beilstein Journal of Nanotechnology},
volume = {11},
pages = {76-97},
abstract = {This article compares the performance of traditional and recently proposed demodulators for multifrequency atomic force microscopy. The compared methods include the lock-in amplifier, coherent demodulator, Kalman filter, Lyapunov filter, and direct-design demodulator. Each method is implemented on a field-programmable gate array (FPGA) with a sampling rate of 1.5 MHz. The metrics for comparison include the sensitivity to other frequency components and the magnitude of demodulation artifacts for a range of demodulator bandwidths. Performance differences are demonstrated through higher harmonic atomic force microscopy imaging.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
K. Wang; M. G. Ruppert; C. Manzie; D. Nesic; Y. K. Yong
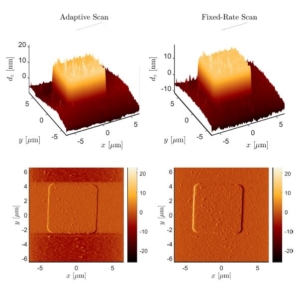
Scan Rate Adaptation for AFM Imaging Based on Performance Metric Optimisation Journal Article
In: IEEE/ASME Transactions on Mechatronics, 2019, (early access).
@article{Wang2019b,
title = {Scan Rate Adaptation for AFM Imaging Based on Performance Metric Optimisation},
author = {K. Wang and M. G. Ruppert and C. Manzie and D. Nesic and Y. K. Yong },
url = {https://ieeexplore.ieee.org/document/8867937},
doi = {10.1109/TMECH.2019.2947203},
year = {2019},
date = {2019-10-14},
journal = { IEEE/ASME Transactions on Mechatronics},
abstract = {Constant-force contact-mode atomic force microscopy (AFM) relies on a feedback control system to regulate the tip-sample interaction during imaging. Due to limitations in actuators and control, the bandwidth of the regulation system is typically small. Therefore, the scan rate is usually limited in order to guarantee a desirable image quality for a constant-rate scan. By adapting the scan rate online, further performance improvement is possible, and the conditions to this improvement has been explored qualitatively in a previous study for a wide class of possible scan patterns. In this paper, a quantitative assessment of the previously proposed adaptive scan scheme is investigated through experiments that explore the impact of various degrees of freedom in the algorithm. Further modifications to the existing scheme are proposed and shown to improve the closed-loop performance. The flexibility of the proposed approach is further demonstrated by applying the algorithm to tapping-mode AFM.},
note = {early access},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
S. I. Moore; M. G. Ruppert; Y. K. Yong
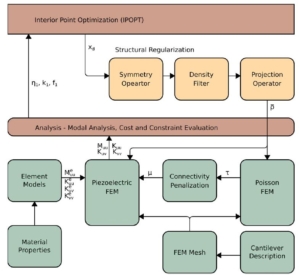
An optimization framework for the design of piezoelectric AFM cantilevers Journal Article
In: Precision Engineering, vol. 60, pp. 130-142, 2019, (This work was supported by the Australian Research Council Discovery Project DP170101813).
@article{Moore2019c,
title = {An optimization framework for the design of piezoelectric AFM cantilevers},
author = {S. I. Moore and M. G. Ruppert and Y. K. Yong},
url = {https://www.sciencedirect.com/science/article/pii/S0141635919302260},
year = {2019},
date = {2019-08-15},
urldate = {2019-08-15},
journal = {Precision Engineering},
volume = {60},
pages = {130-142},
abstract = {To facilitate further miniaturization of atomic force microscopy (AFM) cantilevers and to eliminate the standard optical beam deflection sensor, integrated piezoelectric actuation and sensing on the chip level is a promising option. This article presents a topology optimization method for dynamic mode AFM cantilevers that maximizes the sensitivity of an integrated piezoelectric sensor under stiffness and resonance frequency constraints. Included in the formulation is a new material model C-SIMP (connectivity and solid isotropic material with penalization) that extends the SIMP model to explicitly include the penalization of unconnected structures. Example cantilever designs demonstrate the potential of the topology optimization method. The results show, firstly, the C-SIMP material model significantly reduces connectivity issues and, secondly, arbitrary cantilever topologies can produce increases in sensor sensitivity or resonance frequency compared to a rectangular topology.},
note = {This work was supported by the Australian Research Council Discovery Project DP170101813},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
S. I. Moore; M. G. Ruppert; D. M. Harcombe; A. J. Fleming; Y. K. Yong
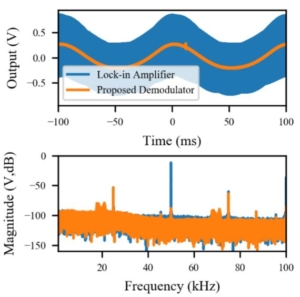
Design and Analysis of Low-Distortion Demodulators for Modulated Sensors Journal Article
In: IEEE/ASME Transactions on Mechatronics, vol. 24, no. 4, pp. 1861-1870, 2019, ISSN: 10834435, (This work was supported by the Australian Research Council Discovery Project DP170101813).
@article{Moore2019,
title = {Design and Analysis of Low-Distortion Demodulators for Modulated Sensors},
author = { S. I. Moore and M. G. Ruppert and D. M. Harcombe and A. J. Fleming and Y. K. Yong },
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2020/05/J19d-reduced.pdf},
doi = {10.1109/TMECH.2019.2928592},
issn = {10834435},
year = {2019},
date = {2019-07-17},
urldate = {2019-07-17},
journal = {IEEE/ASME Transactions on Mechatronics},
volume = {24},
number = {4},
pages = {1861-1870},
abstract = {System-based demodulators in the form of a Kalman and Lyapunov filter have been demonstrated to significantly outperform traditional demodulators, such as the lock-in amplifier, in bandwidth sensitive applications, for example high-speed atomic force microscopy. Building on their closed loop architecture, this article describes a broader class of high-speed closed-loop demodulators. The generic structure provides greater flexibility to independently control the bandwidth and sensitivity to out-of-band frequencies. A linear time-invariant description is derived which allows the utilization of linear control theory to design the demodulator. Experimental results on a nanopositioner with capacitive sensors demonstrate the realization of arbitrary demodulator dynamics while achieving excellent noise rejection.},
note = {This work was supported by the Australian Research Council Discovery Project DP170101813},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
K. Wang; M. G. Ruppert; C. Manzie; D. Nesic; Y. K. Yong
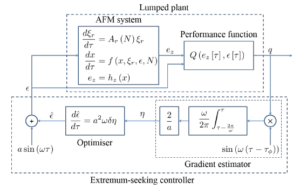
Adaptive Scan for Atomic Force Microscopy Based on Online Optimisation: Theory and Experiment Journal Article
In: IEEE Transactions on Control System Technology, 2019, (accepted for publication).
@article{Wang2019,
title = {Adaptive Scan for Atomic Force Microscopy Based on Online Optimisation: Theory and Experiment},
author = {K. Wang and M. G. Ruppert and C. Manzie and D. Nesic and Y. K. Yong},
url = {https://ieeexplore.ieee.org/document/8643730},
year = {2019},
date = {2019-01-31},
journal = {IEEE Transactions on Control System Technology},
abstract = {A major challenge in Atomic Force Microscopy
(AFM) is to reduce the scan duration while retaining the
image quality. Conventionally, the scan rate is restricted to a
sufficiently small value in order to ensure a desirable image
quality as well as a safe tip-sample contact force. This usually
results in a conservative scan rate for samples that have a
large variation in aspect ratio and/or for scan patterns that
have a varying linear velocity. In this paper, an adaptive scan
scheme is proposed to alleviate this problem. A scan line-based
performance metric balancing both imaging speed and accuracy
is proposed, and the scan rate is adapted such that the metric
is optimised online in the presence of aspect ratio and/or linear
velocity variations. The online optimisation is achieved using an
extremum-seeking (ES) approach, and a semi-global practical
asymptotic stability (SGPAS) result is shown for the overall
system. Finally, the proposed scheme is demonstrated via both
simulation and experiment.},
note = {accepted for publication},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
(AFM) is to reduce the scan duration while retaining the
image quality. Conventionally, the scan rate is restricted to a
sufficiently small value in order to ensure a desirable image
quality as well as a safe tip-sample contact force. This usually
results in a conservative scan rate for samples that have a
large variation in aspect ratio and/or for scan patterns that
have a varying linear velocity. In this paper, an adaptive scan
scheme is proposed to alleviate this problem. A scan line-based
performance metric balancing both imaging speed and accuracy
is proposed, and the scan rate is adapted such that the metric
is optimised online in the presence of aspect ratio and/or linear
velocity variations. The online optimisation is achieved using an
extremum-seeking (ES) approach, and a semi-global practical
asymptotic stability (SGPAS) result is shown for the overall
system. Finally, the proposed scheme is demonstrated via both
simulation and experiment.
M. G. Ruppert; S. I. Moore; M. Zawierta; A. J. Fleming; G. Putrino; Y. K. Yong
Multimodal atomic force microscopy with optimized higher eigenmode sensitivity using on-chip piezoelectric actuation and sensing Journal Article
In: Nanotechnology, vol. 30, no. 8, pp. 085503, 2019, (This work was supported by the Australian Research Council Discovery Project DP170101813).
@article{Ruppert2018b,
title = {Multimodal atomic force microscopy with optimized higher eigenmode sensitivity using on-chip piezoelectric actuation and sensing},
author = {M. G. Ruppert and S. I. Moore and M. Zawierta and A. J. Fleming and G. Putrino and Y. K. Yong},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2019/08/Ruppert_2019_Nanotechnology_30_085503.pdf},
doi = {https://doi.org/10.1088/1361-6528/aae40b},
year = {2019},
date = {2019-01-02},
urldate = {2019-01-02},
journal = {Nanotechnology},
volume = {30},
number = {8},
pages = {085503},
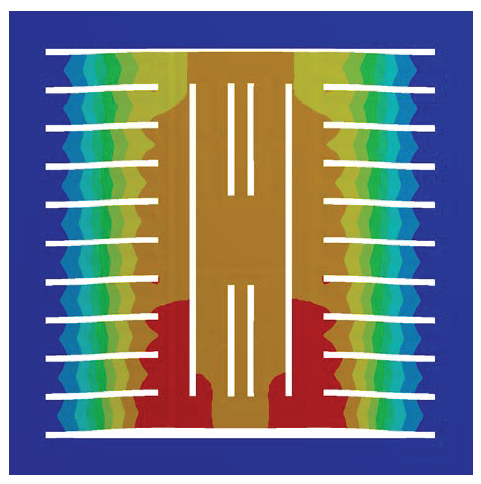
abstract = {Atomic force microscope (AFM) cantilevers with integrated actuation and sensing provide several distinct advantages over conventional cantilever instrumentation. These include clean frequency responses, the possibility of down-scaling and parallelization to cantilever arrays as well as the absence of optical interference. While cantilever microfabrication technology has continuously advanced over the years, the overall design has remained largely unchanged; a passive rectangular shaped cantilever design has been adopted as the industry wide standard. In this article, we demonstrate multimode AFM imaging on higher eigenmodes as well as bimodal AFM imaging with cantilevers using fully integrated piezoelectric actuation and sensing. The cantilever design maximizes the higher eigenmode deflection sensitivity by optimizing the transducer layout according to the strain mode shape. Without the need for feedthrough cancellation, the read-out method achieves close to zero actuator/sensor feedthrough and the sensitivity is sufficient to resolve the cantilever Brownian motion.},
note = {This work was supported by the Australian Research Council Discovery Project DP170101813},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Y. R. Teo; Y. K. Yong; A. J. Fleming
A Comparison Of Scanning Methods And The Vertical Control Implications For Scanning Probe Microscopy Journal Article
In: Asian Journal of Control, vol. 30, no. 4, pp. 1-15, 2018.
@article{J18f,
title = {A Comparison Of Scanning Methods And The Vertical Control Implications For Scanning Probe Microscopy},
author = {Y. R. Teo and Y. K. Yong and A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2021/02/J18f.pdf},
doi = {10.1002/asjc.1422},
year = {2018},
date = {2018-07-01},
journal = {Asian Journal of Control},
volume = {30},
number = {4},
pages = {1-15},
abstract = {This article compares the imaging performance of non-traditional scanning patterns for scanning probe microscopy including sinusoidal raster, spiral, and Lissajous patterns. The metrics under consideration include the probe velocity, scanning frequency, and required sampling rate. The probe velocity is investigated in detail as this quantity is proportional to the required bandwidth of the vertical feedback loop and has a major impact on image quality. By considering a sample with an impulsive Fourier transform, the effect of scanning trajectories on imaging quality can be observed and quantified. The non-linear trajectories are found to spread the topography signal bandwidth which has important implications for both low and high-speed imaging. These effects are studied analytically and demonstrated experimentally with a periodic calibration grating. },
keywords = {},
pubstate = {published},
tppubtype = {article}
}
M. G. Ruppert
Self-sensing, estimation and control in multifrequency Atomic Force Microscopy. Journal Article
In: Journal & Proceedings of the Royal Society of New South Wales, vol. 151, no. 1, pp. 111, 2018, ISSN: 0035-9173/18/010111-01.
@article{Ruppert2018b,
title = {Self-sensing, estimation and control in multifrequency Atomic Force Microscopy. },
author = {M. G. Ruppert},
url = {https://royalsoc.org.au/images/pdf/journal/151-1-Ruppert.pdf},
issn = {0035-9173/18/010111-01},
year = {2018},
date = {2018-06-01},
journal = {Journal & Proceedings of the Royal Society of New South Wales},
volume = {151},
number = {1},
pages = {111},
abstract = {Despite the undeniable success of the atomic force microscope (AFM), dynamic techniques still face limitations in terms of spatial resolution, imaging speed and high cost of acquisition. In order to expand the capabilities of the instrument, it was realized that the information about the nano-mechanical properties of a sample are encoded over a range of frequencies and the excitation and detection of higher-order eigenmodes of the micro-cantilever open up further informa-
tion channels. The ability to control these modes and their fast responses to excitation is believed to be the key to unravelling the true potential of these ethods. This work addresses three major drawbacks of the standard AFM setup, which limit the feasibility of multi-frequency approaches.
First, microelectromechanical system (MEMS) probes with integrated piezoelectric layers is motivated, enabling the development of novel multimode self-sensing and self-actuating techniques. Specifically, these piezoelectric transduction schemes permit the miniaturization of the entire AFM towards a cost-effective single-chip device with nanoscale precision in a much smaller form factor than that of conventional macroscale instruments.
Second, the integrated actuation enables the development of multimode controllers which exhibits remarkable performance in arbitrarily modifying the quality factor of multiple eigenmodes and comes with inherent stability robustness. The experimental results demonstrate improved imaging stability, higher scan speeds and adjustable contrast when mapping nano-mechanical properties of soft samples.
Last, in light of the demand for constantly increasing imaging speeds while providing multi-frequency flexibility, the estimation of multiple components of the high-frequency deflection signal is performed with a linear time-varying multi-frequency Kalman filter. The chosen representation allows for an efficient high-bandwidth implementation on a Field Programmable Gate Array. Tracking bandwidth, noise performance and trimodal AFM imaging on a two-component polymer sample are verified and shown to be superior to that of the commonly used lock-in amplifier.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
tion channels. The ability to control these modes and their fast responses to excitation is believed to be the key to unravelling the true potential of these ethods. This work addresses three major drawbacks of the standard AFM setup, which limit the feasibility of multi-frequency approaches.
First, microelectromechanical system (MEMS) probes with integrated piezoelectric layers is motivated, enabling the development of novel multimode self-sensing and self-actuating techniques. Specifically, these piezoelectric transduction schemes permit the miniaturization of the entire AFM towards a cost-effective single-chip device with nanoscale precision in a much smaller form factor than that of conventional macroscale instruments.
Second, the integrated actuation enables the development of multimode controllers which exhibits remarkable performance in arbitrarily modifying the quality factor of multiple eigenmodes and comes with inherent stability robustness. The experimental results demonstrate improved imaging stability, higher scan speeds and adjustable contrast when mapping nano-mechanical properties of soft samples.
Last, in light of the demand for constantly increasing imaging speeds while providing multi-frequency flexibility, the estimation of multiple components of the high-frequency deflection signal is performed with a linear time-varying multi-frequency Kalman filter. The chosen representation allows for an efficient high-bandwidth implementation on a Field Programmable Gate Array. Tracking bandwidth, noise performance and trimodal AFM imaging on a two-component polymer sample are verified and shown to be superior to that of the commonly used lock-in amplifier.
M. G. Ruppert; D. M. Harcombe; M. R. P. Ragazzon; S. O. R. Moheimani; A. J. Fleming
A Review of Demodulation Techniques for Amplitude Modulation Atomic Force Microscopy Journal Article
In: Bellstein Journal of Nanotechnology, vol. 8, pp. 1407–1426, 2017.
@article{J17h,
title = {A Review of Demodulation Techniques for Amplitude Modulation Atomic Force Microscopy},
author = {M. G. Ruppert and D. M. Harcombe and M. R. P. Ragazzon and S. O. R. Moheimani and A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2020/08/2190-4286-8-142.pdf},
doi = {10.3762/bjnano.8.142},
year = {2017},
date = {2017-09-01},
journal = {Bellstein Journal of Nanotechnology},
volume = {8},
pages = {1407–1426},
abstract = {In this review paper, traditional and novel demodulation methods applicable to amplitude modulation atomic force microscopy are implemented on a widely used digital processing system. As a crucial bandwidth-limiting component in the z-axis feedback loop of an atomic force microscope, the purpose of the demodulator is to obtain estimates of amplitude and phase of the cantilever deflection signal in the presence of sensor noise or additional distinct frequency components. Specifically for modern multifrequency techniques, where higher harmonic and/or higher eigenmode contributions are present in the oscillation signal, the fidelity of the estimates obtained from some demodulation techniques is not guaranteed. To enable a rigorous comparison, the performance metrics tracking bandwidth, implementation complexity and sensitivity to other frequency components are experimentally evaluated for each method. Finally, the significance of an adequate demodulator bandwidth is highlighted during high-speed tapping-mode AFM experiments in constant height mode.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
M. R. P. Ragazzon; M. G. Ruppert; D. M. Harcombe; A. J. Fleming; J. T. Gravdahl
Lyapunov Estimator for High-Speed Demodulation in Dynamic Mode Atomic Force Microscopy Journal Article
In: IEEE Transactions on Control Systems Technology, vol. 26, no. 2, pp. 765-772, 2017.
@article{J17e,
title = {Lyapunov Estimator for High-Speed Demodulation in Dynamic Mode Atomic Force Microscopy},
author = {M. R. P. Ragazzon and M. G. Ruppert and D. M. Harcombe and A. J. Fleming and J. T. Gravdahl},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2017/09/J17e.pdf},
year = {2017},
date = {2017-08-01},
journal = {IEEE Transactions on Control Systems Technology},
volume = {26},
number = {2},
pages = {765-772},
abstract = {In dynamic mode atomic force microscopy (AFM), the imaging bandwidth is governed by the slowest component in the open-loop chain consisting of the vertical actuator, cantilever and demodulator. While the common demodulation method is to use a lock-in amplifier (LIA), its performance is ultimately bounded by the bandwidth of the post-mixing low-pass filters. This article proposes an amplitude and phase estimation method based on a strictly positive real Lyapunov design approach. The estimator is designed to be of low complexity while allowing for high bandwidth. Additionally, suitable gains for high performance are suggested such that no tuning is necessary. The Lyapunov estimator is experimentally implemented for amplitude demodulation and shown to surpass the LIA in terms of tracking bandwidth and noise performance. High-speed AFM images are presented to corroborate the results.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
S. I. Moore; Y. K. Yong
Design and Characterization of Cantilevers for Multi-Frequency Atomic Force Microscopy Journal Article
In: Micro & Nano Letters, vol. 12, no. 5, pp. 315-320, 2017, (This work was supported by the Australian Research Council Discovery Project DP170101813).
@article{Moore2017,
title = {Design and Characterization of Cantilevers for Multi-Frequency Atomic Force Microscopy},
author = {S. I. Moore and Y. K. Yong},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2017/01/MNL.2016.0586.pdf},
doi = {10.1049/mnl.2016.0586},
year = {2017},
date = {2017-03-01},
urldate = {2017-03-01},
journal = {Micro & Nano Letters},
volume = {12},
number = {5},
pages = {315-320},
abstract = {The experimental characterisation of a set of microcantilevers targeted at use in multi-frequency atomic force microscope is presented. The aim of this work is to design a cantilever that naturally amplifies its harmonic oscillations which are introduced by nonlinear probe–sample
interaction forces. This is performed by placing the modal frequencies of the cantilever at integer multiples of the first modal frequency. The developed routine demonstrates the placement of the frequency of the second to fifth mode. The characterisation shows a trend that
lower-order modes are more accurately placed than higher-order modes. With two fabricated designs, the error in the second mode is at most 2.26% while the greatest error in the fifth mode is at 10.5%.},
note = {This work was supported by the Australian Research Council Discovery Project DP170101813},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
interaction forces. This is performed by placing the modal frequencies of the cantilever at integer multiples of the first modal frequency. The developed routine demonstrates the placement of the frequency of the second to fifth mode. The characterisation shows a trend that
lower-order modes are more accurately placed than higher-order modes. With two fabricated designs, the error in the second mode is at most 2.26% while the greatest error in the fifth mode is at 10.5%.
S. I. Moore; M. G. Ruppert; Y. K. Yong
Multimodal cantilevers with novel piezoelectric layer topology for sensitivity enhancement Journal Article
In: Beilstein Journal of Nanotechnology, vol. 8, pp. 358–371, 2017, (This work was supported by the Australian Research Council Discovery Project DP170101813).
@article{Moore2017b,
title = {Multimodal cantilevers with novel piezoelectric layer topology for sensitivity enhancement},
author = {S. I. Moore and M. G. Ruppert and Y. K. Yong},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2017/02/2190-4286-8-38.pdf},
year = {2017},
date = {2017-02-06},
urldate = {2017-02-06},
journal = {Beilstein Journal of Nanotechnology},
volume = {8},
pages = {358--371},
abstract = {Self-sensing techniques for atomic force microscope (AFM) cantilevers have several advantageous characteristics compared to the optical beam deflection method. The possibility of down scaling, parallelization of cantilever arrays and the absence of optical interference associated imaging artifacts have led to an increased research interest in these methods. However, for multifrequency AFM, the optimization of the transducer layout on the cantilever for higher order modes has not been addressed. To fully utilize an integrated piezoelectric transducer, this work alters the layout of the piezoelectric layer to maximize both the deflection of the cantilever and measured piezoelectric charge response for a given mode with respect to the spatial distribution of the strain. On a prototype cantilever design, significant increases in actuator and sensor sensitivities were achieved for the first four modes without any substantial increase in sensor noise. The transduction mechanism is specifically targeted at multifrequency AFM and has the potential to provide higher resolution imaging on higher order modes.},
note = {This work was supported by the Australian Research Council Discovery Project DP170101813},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
A. Bazaei; Y. K. Yong; S. O. R. Moheimani
Combining Spiral Scanning and Internal Model Control for Sequential AFM Imaging at Video Rate Journal Article
In: IEEE Transactions on Mechatronics, vol. 22, no. 1, pp. 371-380, 2017.
@article{Bazaei2017,
title = {Combining Spiral Scanning and Internal Model Control for Sequential AFM Imaging at Video Rate},
author = {A. Bazaei and Y. K. Yong and S. O. R. Moheimani },
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2017/05/07482697.pdf},
year = {2017},
date = {2017-02-01},
journal = {IEEE Transactions on Mechatronics},
volume = {22},
number = {1},
pages = {371-380},
abstract = {We report on the application of internal model control for accurate tracking of a spiral trajectory for atomic force microscopy (AFM). With a closed-loop bandwidth of only 300 Hz, we achieved tracking errors as low as 0.31% of the scan diameter and an ultravideo frame rate for a high pitch (30 nm) spiral trajectory generated by amplitude modulation of 3 kHz sinusoids. Design and synthesis procedures are proposed for a smooth modulating waveform to minimize the steady-state tracking error during sequential imaging. To obtain AFM images under the constant force condition, a high bandwidth analogue proportional integral controller is applied to the damped z-axis of a flexure nanopositioner. Efficacy of the proposed method was demonstrated by artifact-free images at a rate of 37.5 frames/s.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
M. G. Ruppert; A. G. Fowler; M. Maroufi; S. O. R. Moheimani
On-chip Dynamic Mode Atomic Force Microscopy: A silicon-on-insulator MEMS approach Journal Article
In: IEEE Journal of Microelectromechanical Systems, vol. 26, no. 1, pp. 215-225, 2017.
@article{Ruppert2017,
title = {On-chip Dynamic Mode Atomic Force Microscopy: A silicon-on-insulator MEMS approach},
author = {M. G. Ruppert and A. G. Fowler and M. Maroufi and S. O. R. Moheimani},
doi = {10.1109/JMEMS.2016.2628890},
year = {2017},
date = {2017-02-01},
journal = {IEEE Journal of Microelectromechanical Systems},
volume = {26},
number = {1},
pages = {215-225},
abstract = {The atomic force microscope (AFM) is an invaluable scientific tool; however, its conventional implementation as a relatively costly macroscale system is a barrier to its more widespread use. A microelectromechanical systems (MEMS) approach to AFM design has the potential to significantly reduce the cost and complexity of the AFM, expanding its utility beyond current applications. This paper presents an on-chip AFM based on a silicon-on-insulator MEMS fabrication process. The device features integrated xy electrostatic actuators and electrothermal sensors as well as an AlN piezoelectric layer for out-of-plane actuation and integrated deflection sensing of a microcantilever. The three-degree-of-freedom design allows the probe scanner to obtain topographic tapping-mode AFM images with an imaging range of up to 8μm x 8μm in closed loop.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Y. K. Yong; A. J. Fleming
High-speed Vertical Positioning Stage with Integrated Dual-sensor Arrangement Journal Article
In: Sensors & Actuators: A. Physical, vol. 248, pp. 184–192, 2016.
@article{J16d,
title = {High-speed Vertical Positioning Stage with Integrated Dual-sensor Arrangement},
author = {Y. K. Yong and A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2016/08/1-s2.0-S0924424716303302-main-1.pdf},
doi = {https://doi.org/10.1016/j.sna.2016.06.042},
year = {2016},
date = {2016-12-01},
journal = {Sensors & Actuators: A. Physical},
volume = {248},
pages = {184--192},
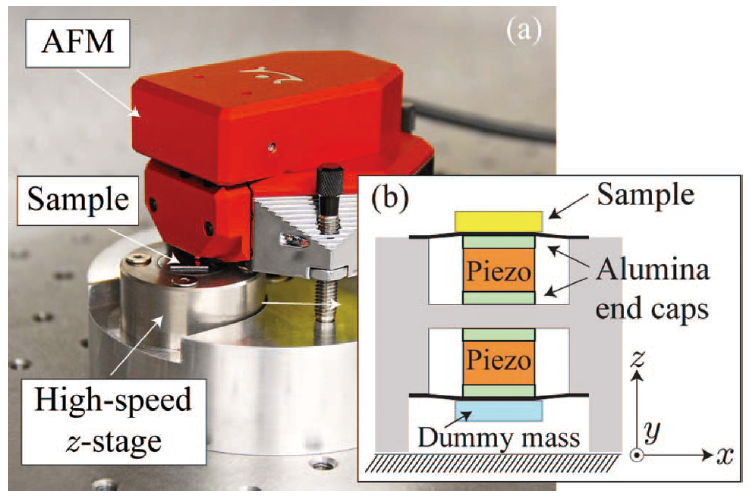
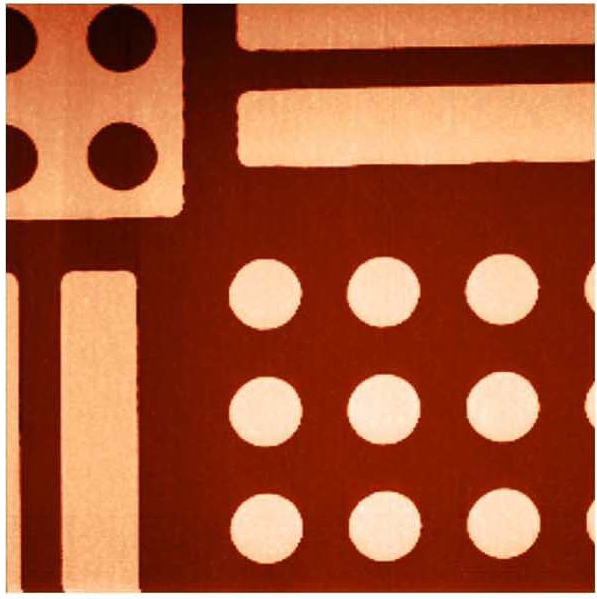
abstract = {This article presents a novel vertical positioning stage with a dual-sensor arrangement suitable for scanning probe microscopy. The stage has a travel range of 8.4um and a first resonance frequency of 24kHz in the direction of travel. The sensor arrangement consists of an integrated piezoelectric force sensor and laminated piezoresistive strain sensor. The piezoelectric force sensor exhibits extremely low noise and introduces a zero into the dynamics which allows the use of integral force feedback. This control method provides excellent damping performance and guaranteed stability. The piezoresistive sensor is used for tracking control with an analog PI controller which is shown to be an approximate inverse of the damped system. The resulting closed-loop system has a bandwidth is 11.4kHz and 6-sigma resolution of 3.6nm, which is ideal for nanopositioning and atomic force microscopy (AFM) applications. The proposed vertical stage is used to replace the vertical axis of a commercial AFM. Scans are performed in constant-force contact mode with a tip velocity of 0.2mm/s, 1mm/s and 2mm/s. The recorded images contain negligible artefacts due to insufficient vertical bandwidth.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
M. G. Ruppert; D. M. Harcombe; S. O. R. Moheimani
High-Bandwidth Demodulation in MF-AFM: A Kalman Filtering Approach Journal Article
In: IEEE/ASME Transactions on Mechatronics, vol. 21, no. 6, pp. 2705-2715, 2016.
@article{Ruppert2016,
title = {High-Bandwidth Demodulation in MF-AFM: A Kalman Filtering Approach},
author = {M. G. Ruppert and D. M. Harcombe and S. O. R. Moheimani},
doi = {10.1109/TMECH.2016.2574640},
year = {2016},
date = {2016-12-01},
journal = {IEEE/ASME Transactions on Mechatronics},
volume = {21},
number = {6},
pages = {2705-2715},
abstract = {Emerging multifrequency atomic force microscopy (MF-AFM) methods rely on coherent demodulation of the cantilever deflection signal at multiple frequencies. These measurements are needed in order to close the z-axis feedback loop and to acquire complementary information on the tip-sample interaction. While the common method is to use a lock-in amplifier capable of recovering low-level signals from noisy backgrounds, its performance is ultimately bounded by the bandwidth of the low-pass filters. In light of the demand for constantly increasing imaging speeds while providing multifrequency flexibility, we propose to estimate the in-phase and quadrature components with a linear time-varying Kalman filter. The chosen representation allows for an efficient high-bandwidth implementation on a Field Programmable Gate Array (FPGA). Tracking bandwidth and noise performance are verified experimentally and trimodal AFM results on a two-component polymer sample highlight the applicability of the proposed method for MF-AFM.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
M. G. Ruppert; S. O. R. Moheimani
Multimode Q Control in Tapping-Mode AFM: Enabling Imaging on Higher Flexural Eigenmodes Journal Article
In: IEEE Transactions on Control Systems Technology, vol. 24, no. 4, pp. 1149-1159, 2016.
@article{Ruppert2016b,
title = {Multimode Q Control in Tapping-Mode AFM: Enabling Imaging on Higher Flexural Eigenmodes},
author = {M. G. Ruppert and S. O. R. Moheimani},
doi = {10.1109/TCST.2015.2478077},
year = {2016},
date = {2016-07-01},
journal = {IEEE Transactions on Control Systems Technology},
volume = {24},
number = {4},
pages = {1149-1159},
abstract = {Numerous dynamic Atomic Force Microscopy (AFM) methods have appeared in recent years, which make use of the excitation and detection of higher order eigenmodes of the microcantilever. The ability to control these modes and their responses to excitation is believed to be the key to unraveling the true potential of these methods. In this work, we highlight a multi-mode Q control method that exhibits remarkable damping performance and stability robustness. The experimental results obtained in ambient conditions demonstrate improved imaging stability by damping non-driven resonant modes when scanning is performed at a higher eigenmode of the cantilever. Higher scan speeds are shown to result from a decrease in transient response time. },
keywords = {},
pubstate = {published},
tppubtype = {article}
}
M. G. Ruppert; K. S. Karvinen; S. L. Wiggins; S. O. R. Moheimani
A Kalman Filter for Amplitude Estimation in High-Speed Dynamic Mode Atomic Force Microscopy Journal Article
In: IEEE Transactions on Control Systems Technology, vol. 24, no. 1, pp. 276-284, 2016.
@article{Ruppert2016b,
title = {A Kalman Filter for Amplitude Estimation in High-Speed Dynamic Mode Atomic Force Microscopy},
author = {M. G. Ruppert and K. S. Karvinen and S. L. Wiggins and S. O. R. Moheimani},
doi = {10.1109/TCST.2015.2435654},
year = {2016},
date = {2016-01-01},
journal = {IEEE Transactions on Control Systems Technology},
volume = {24},
number = {1},
pages = {276-284},
abstract = {A fundamental challenge in dynamic mode atomic force microscopy (AFM) is the estimation of the cantilever oscillation amplitude from the deflection signal which might be distorted by noise and/or high-frequency components. When the cantilever is excited at resonance, its deflection is typically obtained via narrowband demodulation using a lock-in amplifier. However, the bandwidth of this measurement technique is ultimately bounded by the low-pass filter which must be employed after demodulation to attenuate the component at twice the carrier frequency. Furthermore, to measure the amplitude of multiple frequency components such as higher eigenmodes and/or higher harmonics in multifrequency AFM, multiple lock-in amplifiers must be employed. In this work, the authors propose the estimation of amplitude and phase using a linear time-varying Kalman filter which is easily extended to multiple frequencies. Experimental results are obtained using square-modulated sine waves and closed-loop AFM scans, verifying the performance of the proposed Kalman filter.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
A. J. Fleming; Y. R. Teo; K. K. Leang
Low-order Damping and Tracking Control for Scanning Probe Systems Journal Article
In: Frontiers in Mechanical Engineering, vol. 1, pp. 1-9, 2015.
@article{J15e,
title = {Low-order Damping and Tracking Control for Scanning Probe Systems},
author = {A. J. Fleming and Y. R. Teo and K. K. Leang
},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2015/12/J15e.pdf},
doi = {10.3389/fmech.2015.00014},
year = {2015},
date = {2015-12-30},
journal = {Frontiers in Mechanical Engineering},
volume = {1},
pages = {1-9},
abstract = {This article describes an improvement to integral resonance damping control (IRC) for reference tracking applications such as Scanning Probe Microscopy and nanofabrication. It is demonstrated that IRC control introduces a low-frequency pole into the tracking loop which is detrimental for performance. In this work, the location of this pole is found analytically using Cardano’s method then compensated by parameterizing the tracking controller accordingly. This approach maximizes the closed-loop bandwidth whilst being robust to changes in the resonance frequencies. The refined IRC controller is comprehensively compared to other low-order methods in a practical environment.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Y. K. Yong; S. O. R. Moheimani
Collocated Z-Axis Control of a High-Speed Nanopositioner for Video-Rate Atomic Force Microscopy Journal Article
In: IEEE Transactions on Nanotechnology, vol. 14, no. 2, pp. 338-345, 2015, ISSN: 1536-125X.
@article{Yong2015,
title = {Collocated Z-Axis Control of a High-Speed Nanopositioner for Video-Rate Atomic Force Microscopy},
author = {Y. K. Yong and S. O. R. Moheimani},
url = {http://www.eng.newcastle.edu.au/~yy582/Papers/Yong%202015%20-collocated%20Z-axis%20control.pdf},
doi = {10.1109/TNANO.2015.2394327},
issn = {1536-125X},
year = {2015},
date = {2015-03-01},
journal = {IEEE Transactions on Nanotechnology},
volume = {14},
number = {2},
pages = {338-345},
abstract = {A key hurdle to achieve video-rate atomic force microscopy (AFM) in constant-force contact mode is the inadequate bandwidth of the vertical feedback control loop. This paper describes techniques used to increase the vertical tracking bandwidth of a nanopositioner to a level that is sufficient for video-rate AFM. These techniques involve the combination of: a high-speed XYZ nanopositioner; a passive damping technique that cancels the inertial forces of the Z actuator which in turns eliminates the low 20-kHz vertical resonant mode of the nanopositioner; an active control technique that is used to augment damping to high vertical resonant modes at 60 kHz and above. The implementation of these techniques allows a tenfold increase in the vertical tracking bandwidth, from 2.3 (without damping) to 28.1 kHz. This allows high-quality, video-rate AFM images to be captured at 10 frames/s without noticeable artifacts associated with vibrations and insufficient vertical tracking bandwidth.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
K. S. Karvinen; M. G. Ruppert; K. Mahata; S. O. R. Moheimani
Direct Tip-Sample Force Estimation for High-Speed Dynamic Mode Atomic Force Microscopy Journal Article
In: IEEE Transactions on Nanotechnology, vol. 13, no. 6, pp. 1257-1265, 2014.
@article{Karvinen2014,
title = {Direct Tip-Sample Force Estimation for High-Speed Dynamic Mode Atomic Force Microscopy},
author = {K. S. Karvinen and M. G. Ruppert and K. Mahata and S. O. R. Moheimani},
doi = {10.1109/TNANO.2014.2360878},
year = {2014},
date = {2014-11-01},
journal = {IEEE Transactions on Nanotechnology},
volume = {13},
number = {6},
pages = {1257-1265},
abstract = {We present new insights into the modeling of the microcantilever in dynamic mode atomic force microscopy and outline a novel high-bandwidth tip-sample force estimation technique for the development of high-bandwidth z-axis control. Fundamental to the proposed technique is the assumption that in tapping mode atomic force microscopy, the tip-sample force takes the form of an impulse train. Formulating the estimation problem as a Kalman filter, the tip-sample force is estimated directly; thus, potentially enabling high-bandwidth z-axis control by eliminating the dependence of the control technique on microcantilever dynamics and the amplitude demodulation technique. Application of this technique requires accurate knowledge of the models of the microcantilever; a novel identification method is proposed. Experimental data are used in an offline analysis for verification.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Y. K. Yong; A. Bazaei; S. O. R. Moheimani
Video-rate lissajous-scan atomic force microscopy Journal Article
In: IEEE Transactions on Nanotechnology, vol. 13, no. 1, pp. 85-93, 2014.
@article{Yong201485,
title = {Video-rate lissajous-scan atomic force microscopy},
author = {Y. K. Yong and A. Bazaei and S. O. R. Moheimani},
url = {http://www.eng.newcastle.edu.au/~yy582/Papers/Yong2014%20-%20Video-rate%20Lissajous.pdf},
doi = {10.1109/TNANO.2013.2292610},
year = {2014},
date = {2014-01-01},
journal = {IEEE Transactions on Nanotechnology},
volume = {13},
number = {1},
pages = {85-93},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
S. P. Wadikhaye; Y. K. Yong; B. Bhikkaji; S. O. R. Moheimani
Control of a piezoelectrically actuated high-speed serial-kinematic AFM nanopositioner Journal Article
In: Smart Materials and Structures, vol. 23, no. 2, 2014.
@article{Wadikhaye2014,
title = {Control of a piezoelectrically actuated high-speed serial-kinematic AFM nanopositioner},
author = {S. P. Wadikhaye and Y. K. Yong and B. Bhikkaji and S. O. R. Moheimani},
url = {http://www.eng.newcastle.edu.au/~yy582/Papers/Wadikhaye2014.pdf},
year = {2014},
date = {2014-01-01},
journal = {Smart Materials and Structures},
volume = {23},
number = {2},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
M. G. Ruppert; S. O. R. Moheimani
A novel self-sensing technique for tapping-mode atomic force microscopy Journal Article
In: Review of Scientific Instruments, vol. 84, no. 12, pp. 125006, 2013.
@article{Ruppert2013b,
title = {A novel self-sensing technique for tapping-mode atomic force microscopy},
author = {M. G. Ruppert and S. O. R. Moheimani},
doi = {http://dx.doi.org/10.1063/1.4841855},
year = {2013},
date = {2013-12-01},
journal = {Review of Scientific Instruments},
volume = {84},
number = {12},
pages = {125006},
abstract = {This work proposes a novel self-sensing tapping-mode atomic force microscopy operation utilizing charge measurement. A microcantilever coated with a single piezoelectric layer is simultaneously used for actuation and deflection sensing. The cantilever can be batch fabricated with existing Micro Electro Mechanical System processes. The setup enables the omission of the optical beam deflection technique which is commonly used to measure the cantilever oscillation amplitude. Due to the high amount of capacitive feedthrough in the measured charge signal, a feedforward control technique is employed to increase the dynamic range from less than 1dB to approximately 35dB. Experiments show that the conditioned charge signal achieves excellent signal-to-noise ratio and can therefore be used as a feedback signal for AFM imaging.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
A. Bazaei; Y. K. Yong; S. O. R. Moheimani
High-speed Lissajous-scan atomic force microscopy: Scan pattern planning and control design issues Journal Article
In: Review of Scientific Instruments, vol. 83, no. 063701, pp. (1-10), 2012.
@article{Bazaei2012,
title = {High-speed Lissajous-scan atomic force microscopy: Scan pattern planning and control design issues},
author = {A. Bazaei and Y. K. Yong and S. O. R. Moheimani},
url = {http://www.eng.newcastle.edu.au/~yy582/Papers/High-speed_liss.pdf},
doi = {10.1063/1.4725525},
year = {2012},
date = {2012-01-01},
journal = {Review of Scientific Instruments},
volume = {83},
number = {063701},
pages = {(1-10)},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
S. P. Wadikhaye; Y. K. Yong; S. O. R. Moheimani
Design of a compact serial-kinematic scanner for high-speed atomic force microscopy: An analytical approach Journal Article
In: Micro and Nano Letters, vol. 7, no. 4, pp. 309-313, 2012.
@article{Wadikhaye2012309,
title = {Design of a compact serial-kinematic scanner for high-speed atomic force microscopy: An analytical approach},
author = {S. P. Wadikhaye and Y. K. Yong and S. O. R. Moheimani},
url = {http://www.eng.newcastle.edu.au/~yy582/Papers/Serial_kinematic.pdf},
doi = {10.1049/mnl.2011.0477},
year = {2012},
date = {2012-01-01},
journal = {Micro and Nano Letters},
volume = {7},
number = {4},
pages = {309-313},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
B. J. Kenton; A. J. Fleming; K. K. Leang
A compact ultra-fast vertical nanopositioner for improving SPM scan speed Journal Article
In: Review of Scientific Instruments, vol. 82, no. 12, pp. 123703(1-8), 2011.
@article{J11b,
title = {A compact ultra-fast vertical nanopositioner for improving SPM scan speed},
author = {B. J. Kenton and A. J. Fleming and K. K. Leang},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/J11b.pdf},
year = {2011},
date = {2011-12-01},
journal = {Review of Scientific Instruments},
volume = {82},
number = {12},
pages = {123703(1-8)},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
A. J. Fleming
Dual-stage vertical feedback for high speed-scanning probe microscopy Journal Article
In: IEEE Transactions on Control Systems Technology, vol. 19, no. 1, pp. 156–165, 2011.
@article{J11a,
title = {Dual-stage vertical feedback for high speed-scanning probe microscopy},
author = {A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/J11a.pdf},
year = {2011},
date = {2011-12-01},
journal = {IEEE Transactions on Control Systems Technology},
volume = {19},
number = {1},
pages = {156--165},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
M. Fairbairn; S. O. R. Moheimani; A. J. Fleming
Q control of an atomic force microscope micro-cantilever: a sensor-less approach Journal Article
In: IEEE/ASME Journal of Microelectromechanical Systems, vol. 20, no. 6, pp. 1372–1381, 2011.
@article{J11c,
title = {Q control of an atomic force microscope micro-cantilever: a sensor-less approach},
author = {M. Fairbairn and S. O. R. Moheimani and A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/J11c.pdf},
year = {2011},
date = {2011-12-01},
journal = {IEEE/ASME Journal of Microelectromechanical Systems},
volume = {20},
number = {6},
pages = {1372--1381},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
A. J. Fleming; S. S. Aphale; S. O. R. Moheimani
A new method for robust damping and tracking control of scanning probe microscope positioning stages Journal Article
In: IEEE Transactions on Nanotechnology, vol. 9, no. 4, pp. 438–448, 2010.
@article{J10d,
title = {A new method for robust damping and tracking control of scanning probe microscope positioning stages},
author = {A. J. Fleming and S. S. Aphale and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/J10d.pdf},
year = {2010},
date = {2010-12-01},
journal = {IEEE Transactions on Nanotechnology},
volume = {9},
number = {4},
pages = {438--448},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
A. J. Fleming; B. J. Kenton; K. K. Leang
Bridging the gap between conventional and video-speed scanning probe microscopes Journal Article
In: Ultramicroscopy, vol. 110, no. 9, pp. 1205–1214, 2010.
@article{J10c,
title = {Bridging the gap between conventional and video-speed scanning probe microscopes},
author = {A. J. Fleming and B. J. Kenton and K. K. Leang},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/J10c.pdf},
year = {2010},
date = {2010-12-01},
journal = {Ultramicroscopy},
volume = {110},
number = {9},
pages = {1205--1214},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
A. J. Fleming; K. K. Leang
Integrated strain and force feedback for high performance control of piezoelectric actuators Journal Article
In: Sensors and Actuators A, vol. 161, no. 1-2, pp. 256–265, 2010.
@article{J10b,
title = {Integrated strain and force feedback for high performance control of piezoelectric actuators},
author = {A. J. Fleming and K. K. Leang},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/J10b.pdf},
year = {2010},
date = {2010-12-01},
journal = {Sensors and Actuators A},
volume = {161},
number = {1-2},
pages = {256--265},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
A. J. Fleming
Quantitative SPM topographies by charge linearization of the vertical actuator Journal Article
In: Review of Scientific Instruments, vol. 81, no. 10, pp. 103701(1-5), 2010.
@article{J10f,
title = {Quantitative SPM topographies by charge linearization of the vertical actuator},
author = {A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/J10f.pdf},
year = {2010},
date = {2010-12-01},
journal = {Review of Scientific Instruments},
volume = {81},
number = {10},
pages = {103701(1-5)},
crossref = {(Featured in the Virtual Journal of Nanoscale Science)},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
K. K. Leang; A. J. Fleming
High-speed serial-kinematic AFM scanner: design and drive considerations Journal Article
In: Asian Journal of Control, vol. 11, no. 2, pp. 144-153, 2009.
@article{J09a,
title = {High-speed serial-kinematic AFM scanner: design and drive considerations},
author = {K. K. Leang and A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/J09a.pdf},
year = {2009},
date = {2009-12-01},
journal = {Asian Journal of Control},
volume = {11},
number = {2},
pages = {144-153},
crossref = {(Special Issue)},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
A. J. Fleming; A. G. Wills
Optimal periodic trajectories for band-limited systems Journal Article
In: IEEE Transactions on Control Systems Technology, vol. 13, no. 3, pp. 552-562, 2009.
@article{J09b,
title = {Optimal periodic trajectories for band-limited systems},
author = {A. J. Fleming and A. G. Wills},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/J09b.pdf},
year = {2009},
date = {2009-12-01},
journal = {IEEE Transactions on Control Systems Technology},
volume = {13},
number = {3},
pages = {552-562},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
A. J. Fleming; K. K. Leang
Charge drives for scanning probe microscope positioning stages Journal Article
In: Ultramicroscopy, vol. 108, no. 12, pp. 1551-1557, 2008.
@article{J08e,
title = {Charge drives for scanning probe microscope positioning stages},
author = {A. J. Fleming and K. K. Leang},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/J08e.pdf},
year = {2008},
date = {2008-12-01},
journal = {Ultramicroscopy},
volume = {108},
number = {12},
pages = {1551-1557},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
A. J. Fleming; A. G. Wills; S. O. R. Moheimani
Sensor fusion for improved control of piezoelectric tube scanners Journal Article
In: IEEE Transactions on Control Systems Technology, vol. 15, no. 6, pp. 1265–6536, 2008.
@article{J08d,
title = {Sensor fusion for improved control of piezoelectric tube scanners},
author = {A. J. Fleming and A. G. Wills and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/J08d.pdf},
year = {2008},
date = {2008-12-01},
journal = {IEEE Transactions on Control Systems Technology},
volume = {15},
number = {6},
pages = {1265--6536},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
J. Maess; A. J. Fleming; F. Allgöwer
Simulation of dynamics-coupling in piezoelectric tube scanners by reduced order finite element models Journal Article
In: Review of Scientific Instruments, vol. 79, pp. 015105(1-9), 2008.
@article{J08a,
title = {Simulation of dynamics-coupling in piezoelectric tube scanners by reduced order finite element models},
author = {J. Maess and A. J. Fleming and F. Allgöwer},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/J08a.pdf},
year = {2008},
date = {2008-12-01},
journal = {Review of Scientific Instruments},
volume = {79},
pages = {015105(1-9)},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
S. S. Aphale; A. J. Fleming; S. O. R. Moheimani
High speed nano-scale positioning using a piezoelectric tube actuator with active shunt control Journal Article
In: IET Micro & Nano Letters, vol. 2, no. 1, pp. 9–12, 2007.
@article{J07c,
title = {High speed nano-scale positioning using a piezoelectric tube actuator with active shunt control},
author = {S. S. Aphale and A. J. Fleming and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/J07c.pdf},
year = {2007},
date = {2007-12-01},
journal = {IET Micro & Nano Letters},
volume = {2},
number = {1},
pages = {9--12},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
B. Bhikkaji; M. Ratnam; A. J. Fleming; S. O. R. Moheimani
High-performance control of piezoelectric tube scanners Journal Article
In: IEEE Transactions on Control Systems Technology, vol. 15, no. 5, pp. 853-866, 2007.
@article{J07d,
title = {High-performance control of piezoelectric tube scanners},
author = {B. Bhikkaji and M. Ratnam and A. J. Fleming and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/J07d.pdf},
year = {2007},
date = {2007-12-01},
journal = {IEEE Transactions on Control Systems Technology},
volume = {15},
number = {5},
pages = {853-866},
crossref = {(Special Issue)},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
A. J. Fleming; S. O. R. Moheimani
Sensorless vibration suppression and scan compensation for piezoelectric tube nanopositioners Journal Article
In: IEEE Transactions on Control Systems Technology, vol. 14, no. 1, pp. 33–44, 2006.
@article{J06b,
title = {Sensorless vibration suppression and scan compensation for piezoelectric tube nanopositioners},
author = {A. J. Fleming and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/J06b.pdf},
year = {2006},
date = {2006-12-01},
journal = {IEEE Transactions on Control Systems Technology},
volume = {14},
number = {1},
pages = {33--44},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
A. J. Fleming; S. O. R. Moheimani
A grounded load charge amplifier for reducing hysteresis in piezoelectric tube scanners Journal Article
In: Review of Scientific Instruments, vol. 76, no. 7, pp. 073707(1-5), 2005.
@article{J05d,
title = {A grounded load charge amplifier for reducing hysteresis in piezoelectric tube scanners},
author = {A. J. Fleming and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/J05d.pdf},
year = {2005},
date = {2005-12-01},
journal = {Review of Scientific Instruments},
volume = {76},
number = {7},
pages = {073707(1-5)},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Proceedings Articles
N. F. S. de Bem; M. G. Ruppert; Y. K. Yong; A. J. Fleming
Integrated force and displacement sensing in active microcantilevers for off-resonance tapping mode atomic force microscopy Proceedings Article
In: International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS), pp. 1-6, 2020, (This work was supported by the Australian Research Council Discovery Project DP170101813).
@inproceedings{C20c,
title = {Integrated force and displacement sensing in active microcantilevers for off-resonance tapping mode atomic force microscopy},
author = {N. F. S. de Bem and M. G. Ruppert and Y. K. Yong and A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2021/01/C20c.pdf},
doi = {10.1109/MARSS49294.2020.9307881},
year = {2020},
date = {2020-11-30},
urldate = {2020-11-30},
booktitle = {International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS)},
pages = {1-6},
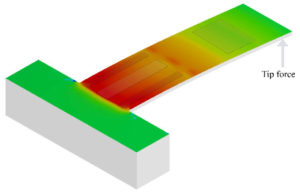
abstract = {Integrated on-chip actuation and sensing in microcantilevers for atomic force microscopy (AFM) allows faster scanning speeds, cleaner frequency responses and smaller cantilevers. However, a single integrated sensor suffers from crosscoupling between displacements originating from tip-sample forces and direct actuation. This paper addresses this issue by presenting a novel microcantilever with on-chip actuation and integrated dual sensing for AFM with application to offresonance tapping modes in AFM. The proposed system is able to measure tip force and deflection simultaneously. A mathematical model is developed for a rectangular cantilever to describe the system and is validated with finite element analysis.},
note = {This work was supported by the Australian Research Council Discovery Project DP170101813},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
M. R. P. Ragazzon; S. Messineo; J. T. Gravdahl; D. M. Harcombe; M. G. Ruppert
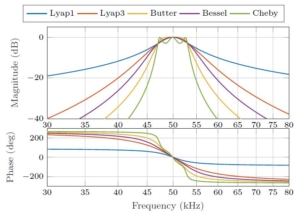
Generalized Lyapunov Demodulator for Amplitude and Phase Estimation by the Internal Model Principle Proceedings Article
In: 8th IFAC Symposium on Mechatronic Systems, 2019, (accepted for publication).
@inproceedings{Ragazzon2019,
title = {Generalized Lyapunov Demodulator for Amplitude and Phase Estimation by the Internal Model Principle},
author = {M. R. P. Ragazzon and S. Messineo and J. T. Gravdahl and D. M. Harcombe and M. G. Ruppert},
year = {2019},
date = {2019-09-04},
booktitle = {8th IFAC Symposium on Mechatronic Systems},
abstract = {Effective demodulation of amplitude and phase is a requirement in a wide array of applications. Recent efforts have increased the demodulation performance, in particular, the Lyapunov demodulator allows bandwidths up to the carrier frequency of the signal. However, being inherently restricted to a single order filtering of the input signal, signal components outside its passband are not sufficiently attenuated for all applications, such as in multifrequency atomic force microscopy. In this article, the structure of the Lyapunov demodulator is transformed to an equivalent form, taking advantage of the internal model representation of the sinusoid to be tracked. A generalization of this formulation allows the application of standard filtering techniques in order to shape the characteristics of the demodulator, while retaining the perfect tracking condition provided by the internal model. Guidelines for the filter design are provided in order to achieve the desired characteristics, such as filtering order, tracking bandwidth, and transient performance. The resulting generalized Lyapunov demodulator structure is highly flexible, allows for direct employment of any standard filter type, is computationally simple, and easy to implement requiring only a bandpass filter, a single integrator, and two nonlinear transformations. Numerical results demonstrate the effectiveness of the approach, and provide a comparison of the various filters considered.},
note = {accepted for publication},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
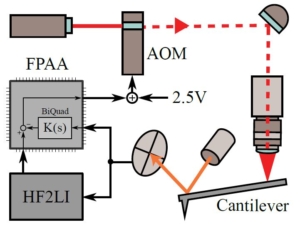
M. G. Ruppert; B. S. Routley; A. J. Fleming; Y. K. Yong; G. E. Fantner
Model-based Q Factor Control for Photothermally Excited Microcantilevers Proceedings Article
In: Int. Conference on Manipulation, Automation and Robotics at Small Scales (MARSS), Helsinki, Finland, 2019, ISSN: 978-1-7281-0948-0, (This work was supported by the Australian Research Council Discovery Project DP170101813).
@inproceedings{Ruppert2019,
title = {Model-based Q Factor Control for Photothermally Excited Microcantilevers},
author = {M. G. Ruppert and B. S. Routley and A. J. Fleming and Y. K. Yong and G. E. Fantner},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2021/02/C19b.pdf},
doi = {10.1109/MARSS.2019.8860969},
issn = {978-1-7281-0948-0},
year = {2019},
date = {2019-07-01},
urldate = {2019-07-01},
booktitle = {Int. Conference on Manipulation, Automation and Robotics at Small Scales (MARSS)},
address = {Helsinki, Finland},
abstract = {Photothermal excitation of the cantilever for dynamic atomic force microscopy (AFM) modes is an attractive actuation method as it provides clean cantilever actuation leading to well-defined frequency responses. Unlike conventional piezo-acoustic excitation of the cantilever, it allows for model-based quality (Q) factor control in order to increase the cantilever tracking bandwidth for tapping-mode AFM or to reduce resonant ringing for high-speed photothermal offresonance tapping (PORT) in ambient conditions. In this work, we present system identification, controller design and experimental results on controlling the Q factor of a photothermally driven cantilever. The work is expected to lay the groundwork for future implementations for high-speed PORT imaging in ambient conditions.},
note = {This work was supported by the Australian Research Council Discovery Project DP170101813},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
M. G. Ruppert; Y. K. Yong
Design of Hybrid Piezoelectric/Piezoresistive Cantilevers for Dynamic-mode Atomic Force Microscopy Proceedings Article
In: IEEE/ASME Advanced Intelligent Mechatronics (AIM), Auckland, New Zealand, 2018, (This work was supported by the Australian Research Council Discovery Project DP170101813).
@inproceedings{Ruppert2018b,
title = {Design of Hybrid Piezoelectric/Piezoresistive Cantilevers for Dynamic-mode Atomic Force Microscopy},
author = {M. G. Ruppert and Y. K. Yong},
year = {2018},
date = {2018-07-09},
urldate = {2018-07-09},
booktitle = {IEEE/ASME Advanced Intelligent Mechatronics (AIM)},
address = {Auckland, New Zealand},
abstract = {Atomic force microscope cantilevers with integrated actuation and sensing on the chip level provide several distinct advantages over conventional cantilever instrumentation. These include clean frequency responses, the possibility of down-scaling and parallelization to cantilever arrays as well as the absence of optical interferences. However, the two major difficulties with integrated transduction methods are a complicated fabrication process, often involving a number of fabrication
steps, and a high amount of feedthrough from actuation to sensing electrodes. This work proposes two hybrid cantilever designs with piezoelectric actuators and piezoresistive sensors to reduce the actuator to sensor feedthrough. The designs can be realized using a commercial microelectromechanical systems fabrication process and only require a simple five-mask patterning and etching process. Finite element analysis results are presented to obtain modal responses, actuator gain and sensor sensitivities of the cantilever designs.},
note = {This work was supported by the Australian Research Council Discovery Project DP170101813},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
steps, and a high amount of feedthrough from actuation to sensing electrodes. This work proposes two hybrid cantilever designs with piezoelectric actuators and piezoresistive sensors to reduce the actuator to sensor feedthrough. The designs can be realized using a commercial microelectromechanical systems fabrication process and only require a simple five-mask patterning and etching process. Finite element analysis results are presented to obtain modal responses, actuator gain and sensor sensitivities of the cantilever designs.
S. I. Moore; M. G. Ruppert; Y. K. Yong
Arbitrary placement of AFM cantilever higher eigenmodes using structural optimization Proceedings Article
In: International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS), 2018, (This work was supported by the Australian Research Council Discovery Project DP170101813).
@inproceedings{Moore2018,
title = {Arbitrary placement of AFM cantilever higher eigenmodes using structural optimization},
author = {S. I. Moore and M. G. Ruppert and Y. K. Yong},
year = {2018},
date = {2018-07-04},
urldate = {2018-07-04},
booktitle = {International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS)},
journal = {International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS)},
abstract = {This article presents a novel cantilever design approach to place higher mode frequencies within a specific frequency band to alleviate instrumentation and Q control feasibility. This work is motivated by the emerging field of multifrequency atomic force microscopy (AFM) which involves the excitation and/or detection of several cantilever modes at once. Unlike other operating modes, multifrequency AFM allows the tracking of the sample topography on the fundamental mode while simultaneously acquiring complimentary nanomechanical information on a higher mode. However, higher modes of conventional rectangular tapping-mode cantilevers are usually in the MHz regime and therefore impose severe restrictions on the direct controllability of these modes. To overcome this limitation, an optimization technique is employed which is capable of placing the first five modes within a 200 kHz bandwidth.},
note = {This work was supported by the Australian Research Council Discovery Project DP170101813},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
S. I. Moore; M. Omidbeike; A. J. Fleming; Y. K. Yong
A monolithic serial-kinematic nanopositioner with integrated sensors and actuators Proceedings Article
In: IEEE International Conference on Advanced Intelligent Mechatronics, Auckland, New Zealand, 2018.
@inproceedings{C18e,
title = {A monolithic serial-kinematic nanopositioner with integrated sensors and actuators},
author = {S. I. Moore and M. Omidbeike and A. J. Fleming and Y. K. Yong},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2021/02/C18e.pdf},
doi = {10.1109/AIM.2018.8452225},
year = {2018},
date = {2018-07-04},
booktitle = {IEEE International Conference on Advanced Intelligent Mechatronics},
address = {Auckland, New Zealand},
abstract = {This article describes the design, modeling and simulation of a serial-kinematic nanopositioner machined from a single sheet of piezoelectric material. In this class of nanopositioners, the flexures, sensors and actuators are completely integrated into a single monolithic structure. A non-trivial electrode topology is etched into the sheet to achieve in-plane bending and displacement of the moving platform. Finite element analysis predicts a sensitivity of 18.6 nm/V in the x-axis and 18.1 nm/V in the yaxis with a voltage limit of −250V to 1000 V. The first resonance frequency is 250 Hz in the Z axis. This design enables high-speed, long-range, lateral positioning in space-limited applications.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
M. G. Ruppert; D. M. Harcombe; S. I. Moore; A. J. Fleming
Direct Design of Closed-loop Demodulators for Amplitude Modulation Atomic Force Microscopy Proceedings Article
In: American Control Conference, Milwaukee, WI, 2018.
@inproceedings{C18b,
title = {Direct Design of Closed-loop Demodulators for Amplitude Modulation Atomic Force Microscopy},
author = {M. G. Ruppert and D. M. Harcombe and S. I. Moore and A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2021/02/C18b.pdf},
doi = {10.23919/ACC.2018.8430896},
year = {2018},
date = {2018-06-27},
booktitle = {American Control Conference},
address = {Milwaukee, WI},
abstract = {A fundamental component of the z-axis feedback loop in amplitude modulation atomic force microscopy is the demodulator. It dictates both bandwidth and noise in the amplitude and phase estimate of the cantilever deflection signal. In this paper, we derive a linear time-invariant model of a closedloop demodulator with user definable tracking bandwidth and sensitivity to other frequency components. A direct demodulator design method is proposed based on the reformulation of the Lyapunov filter as a modulated-demodulated controller in closed loop with a unity plant. Simulation and experimental results for a higher order Lyapunov filter as well as Butterworth and Chebyshev type demodulators are presented.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
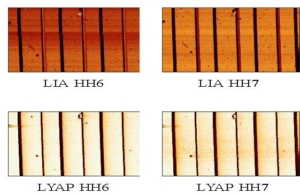
D. M. Harcombe; M. G. Ruppert; A. J. Fleming
Higher-harmonic AFM Imaging with a High-Bandwidth Multifrequency Lyapunov Filter Proceedings Article
In: IEEE/ASME Advanced Intelligent Mechatronics (AIM), Munich, Germany, 2017.
@inproceedings{C17e,
title = {Higher-harmonic AFM Imaging with a High-Bandwidth Multifrequency Lyapunov Filter},
author = {D. M. Harcombe and M. G. Ruppert and A. J. Fleming},
year = {2017},
date = {2017-07-03},
booktitle = {IEEE/ASME Advanced Intelligent Mechatronics (AIM)},
address = {Munich, Germany},
abstract = {A major difficulty in multifrequency atomic force microscopy (MF-AFM) is the accurate estimation of amplitude and phase at multiple frequencies for both z-axis feedback and material contrast imaging. Typically a lock-in amplifier is chosen as it is both narrowband and simple to implement. However, it inherently suffers drawbacks including a limited bandwidth due to post mixing low-pass filters and the necessity for multiple to be operated in parallel for MF-AFM. This paper proposes a multifrequency demodulator in the form of a modelbased Lyapunov filter implemented on a Field Programmable Gate Array (FPGA). System modelling and simulations are verified by experimental results demonstrating high tracking bandwidth and off-mode rejection at modelled frequencies. Additionally, AFM scans with a five-frequency-based system are presented wherein higher harmonic imaging is performed up to 1 MHz.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

S. I. Moore; M. G. Ruppert; Y. K. Yong
Design and Analysis of Piezoelectric Cantilevers with Enhanced Higher Eigenmodes for Atomic Force Microscopy Proceedings Article
In: IEEE/ASME Advanced Intelligent Mechatronics (AIM), Munich, Germany, 2017, (This work was supported by the Australian Research Council Discovery Project DP170101813).
@inproceedings{Moore2017b,
title = {Design and Analysis of Piezoelectric Cantilevers with Enhanced Higher Eigenmodes for Atomic Force Microscopy},
author = {S. I. Moore and M. G. Ruppert and Y. K. Yong},
year = {2017},
date = {2017-07-02},
urldate = {2017-07-02},
booktitle = {IEEE/ASME Advanced Intelligent Mechatronics (AIM)},
address = {Munich, Germany},
abstract = {Atomic force microscope (AFM) cantilevers with
integrated actuation and sensing provide several distinct advantages
over conventional cantilever instrumentation such as
clean frequency responses, the possibility of down-scaling and
parallelization to cantilever arrays as well as the absence of optical
interferences. However, for multifrequency AFM techniques
involving higher eigenmodes of the cantilever, optimization
of the transducer location and layout has to be taken into
account. This work proposes multiple integrated piezoelectric
regions on the cantilever which maximize the deflection of the
cantilever and the piezoelectric charge response for a given
higher eigenmode based on the spatial strain distribution. Finite
element analysis is performed to find the optimal transducer
topology and experimental results are presented which highlight
an actuation gain improvement up to 42 dB on the third mode
and sensor sensitivity improvement up to 38 dB on the second
mode.},
note = {This work was supported by the Australian Research Council Discovery Project DP170101813},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
integrated actuation and sensing provide several distinct advantages
over conventional cantilever instrumentation such as
clean frequency responses, the possibility of down-scaling and
parallelization to cantilever arrays as well as the absence of optical
interferences. However, for multifrequency AFM techniques
involving higher eigenmodes of the cantilever, optimization
of the transducer location and layout has to be taken into
account. This work proposes multiple integrated piezoelectric
regions on the cantilever which maximize the deflection of the
cantilever and the piezoelectric charge response for a given
higher eigenmode based on the spatial strain distribution. Finite
element analysis is performed to find the optimal transducer
topology and experimental results are presented which highlight
an actuation gain improvement up to 42 dB on the third mode
and sensor sensitivity improvement up to 38 dB on the second
mode.
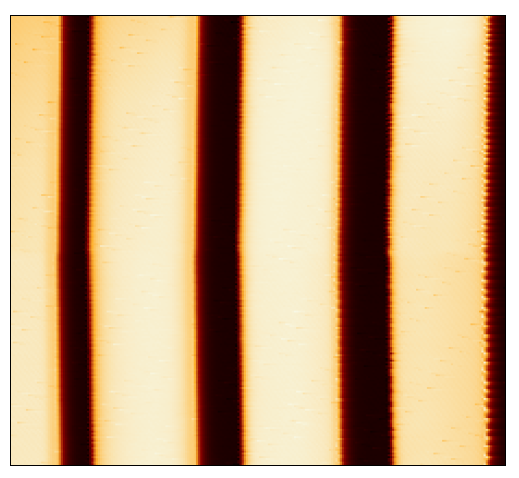
M. G. Ruppert; D. M. Harcombe; M. R. P. Ragazzon; S. O. R. Moheimani; A. J. Fleming
Frequency Domain Analysis of Robust Demodulators for High-Speed Atomic Force Microscopy Proceedings Article
In: American Control Conference, Seattle, WA, 2017.
@inproceedings{C17b,
title = {Frequency Domain Analysis of Robust Demodulators for High-Speed Atomic Force Microscopy},
author = {M. G. Ruppert and D. M. Harcombe and M. R. P. Ragazzon and S. O. R. Moheimani and A. J. Fleming},
year = {2017},
date = {2017-05-01},
booktitle = {American Control Conference},
address = {Seattle, WA},
abstract = {A fundamental but often overlooked component in the z-axis feedback loop of the atomic force microscope (AFM) operated in dynamic mode is the demodulator. It’s purpose is to obtain a preferably fast and low-noise estimate of amplitude and phase of the cantilever deflection signal in the presence of sensor noise and additional distinct frequency components. In this paper, we implement both traditional and recently developed robust methods on a labVIEW digital processing system and rigorously compare these techniques experimentally in terms of measurement bandwidth, implementation complexity and robustness to noise. We conclude with showing high-speed tapping-mode AFM images in constant height, highlighting the significance of an adequate demodulator bandwidth.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
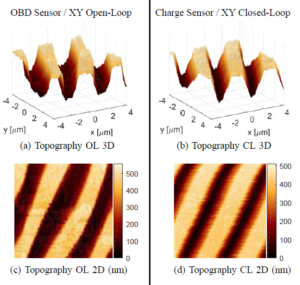
M. Maroufi; M. G. Ruppert; A. G. Fowler; S. O. R. Moheimani
Design and Control of a Single-chip SOI-MEMS Atomic Force Microscope Proceedings Article
In: American Control Conference, 2017.
@inproceedings{Maroufi2017,
title = {Design and Control of a Single-chip SOI-MEMS Atomic Force Microscope},
author = {M. Maroufi and M. G. Ruppert and A. G. Fowler and S. O. R. Moheimani},
year = {2017},
date = {2017-05-01},
booktitle = {American Control Conference},
abstract = {This paper presents a novel microelectromechanical
systems (MEMS) implementation of an on-chip atomic
force microscope (AFM), fabricated using a silicon-on-insulator
process. The device features an XY scanner with electrostatic
actuators and electrothermal sensors, as well as an integrated
silicon microcantilever. A single AlN piezoelectric electrode is
used for simultaneous actuation and deflection sensing of the
cantilever via a charge sensing technique. With the device being
operated in closed loop, the probe scanner is successfully used to
obtain 8mmx8mm tapping-mode AFM images of a calibration
grating.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
systems (MEMS) implementation of an on-chip atomic
force microscope (AFM), fabricated using a silicon-on-insulator
process. The device features an XY scanner with electrostatic
actuators and electrothermal sensors, as well as an integrated
silicon microcantilever. A single AlN piezoelectric electrode is
used for simultaneous actuation and deflection sensing of the
cantilever via a charge sensing technique. With the device being
operated in closed loop, the probe scanner is successfully used to
obtain 8mmx8mm tapping-mode AFM images of a calibration
grating.

R. de Rozario; A. J. Fleming; T. Oomen
Iterative Control for Periodic Tasks with Robustness Considerations, Applied to a Nanopositioning Stage Proceedings Article
In: IFAC Symposium on Mechatronic Systems, Loughborough, UK, 2016.
@inproceedings{C16g,
title = {Iterative Control for Periodic Tasks with Robustness Considerations, Applied to a Nanopositioning Stage},
author = {R. de Rozario and A. J. Fleming and T. Oomen},
year = {2016},
date = {2016-09-05},
booktitle = {IFAC Symposium on Mechatronic Systems},
address = {Loughborough, UK},
abstract = {Nanopositioning stages are an example of motion systems that are required to accurately perform a high frequent repetitive scanning motion. The tracking performance can be signi
cantly increased by iteratively updating a feedforward input by using a nonparametric inverse plant model. However, in this paper it is shown that current approaches lack systematic robustness considerations and are su
ering from limited design freedom to enforce satisfying convergence behavior. Therefore, inspired by existing the Iterative Learning Control approach, robustness is added to the existing methods to enable the desired convergence behavior. This results in the Robust Iterative Inversion-based Control method, whose potential for superior convergence is experimentally veri
ed on a Nanopositioning system.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
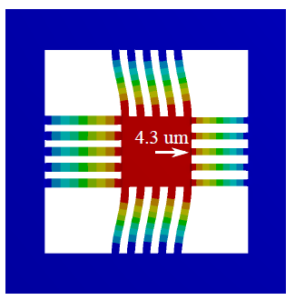
A. J. Fleming; G. Berriman; Y. K. Yong
Design, Modeling, and Characterization of an XY Nanopositioning Stage Constructed from a Single Sheet of Piezoelectric Material Proceedings Article
In: IEEE Advanced Intelligent Mechatronics, Banff, Canada, 2016.
@inproceedings{C16e,
title = {Design, Modeling, and Characterization of an XY Nanopositioning Stage Constructed from a Single Sheet of Piezoelectric Material},
author = {A. J. Fleming and G. Berriman and Y. K. Yong},
year = {2016},
date = {2016-07-12},
booktitle = {IEEE Advanced Intelligent Mechatronics},
address = {Banff, Canada},
abstract = {This article describes the design, fabrication and testing of a new XY nanopositioning stage constructed from a single sheet of piezoelectric material. The approach involves direct ultrasonic machining of a piezoelectric sheet to create flexural and actuator features. An industrial inkjet printer is then used to create electrode features by printing Nitric Acid directly onto the evaporated metal surface of the piezo sheet. The result is a monolithic piezoelectric structure with individual electrical control over each actuator feature. Experimental results demonstrate a full-scale range of 9um in the X and Y axes, and a first resonance frequency of 230Hz in the Z axes. The completed nanopositioner is the thinnest yet reported with a thickness of only 500um. The new design method will enable a new range of ultra-compact applications in scanning probe microscopy, scanning electron microscopy, and active optics. },
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
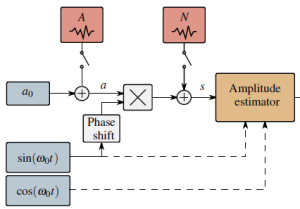
M. R. P. Ragazzon; J. T. Gravdahl; A. J. Fleming
On Amplitude Estimation for High-Speed Atomic Force Microscopy (invited) Proceedings Article
In: American Control Conference, Boston, MA, 2016.
@inproceedings{C16b,
title = {On Amplitude Estimation for High-Speed Atomic Force Microscopy (invited)},
author = {M. R. P. Ragazzon and J. T. Gravdahl and A. J. Fleming },
year = {2016},
date = {2016-07-01},
booktitle = {American Control Conference},
address = {Boston, MA},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
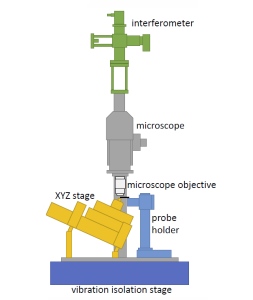
B. S. Routley; A. J. Fleming
High Sensitivity Interferometer for on-Axis Detection of AFM Cantilever Deflection Proceedings Article
In: International Conference on Manipulation, Automation and Robotics at Small Scales, Paris, France, 2016.
@inproceedings{C16i,
title = {High Sensitivity Interferometer for on-Axis Detection of AFM Cantilever Deflection},
author = {B. S. Routley and A. J. Fleming},
year = {2016},
date = {2016-07-01},
booktitle = {International Conference on Manipulation, Automation and Robotics at Small Scales},
address = {Paris, France},
abstract = {A homodyne path stabilised Michelson based interferometer displacement sensor was developed. This sensor achieved a noise floor of 100 fm/rt(Hz), for frequencies higher than 100 kHz. A prototype AFM that integrated this sensor was developed. Using tapping mode, topography maps of an AFM test grid were produced. },
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Y. R. Teo; Y. K. Yong; A. J. Fleming
A Review of Scanning Methods and Control Implications for Scanning Probe Microscopy (Invited Paper) Proceedings Article
In: American Control Conference, Boston, MA, 2016., Boston, MA, 2016.
@inproceedings{C16c,
title = {A Review of Scanning Methods and Control Implications for Scanning Probe Microscopy (Invited Paper)},
author = {Y. R. Teo and Y. K. Yong and A. J. Fleming},
year = {2016},
date = {2016-07-01},
booktitle = {American Control Conference, Boston, MA, 2016.},
address = {Boston, MA},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
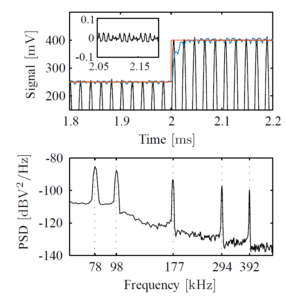
M. G. Ruppert; D. M. Harcombe; S. O. R. Moheimani
State estimation for high-speed multifrequency atomic force microscopy Proceedings Article
In: American Control Conference, pp. 2617-2622, Boston, MA, USA, 2016.
@inproceedings{Ruppert2016b,
title = {State estimation for high-speed multifrequency atomic force microscopy},
author = {M. G. Ruppert and D. M. Harcombe and S. O. R. Moheimani},
doi = {10.1109/ACC.2016.7525311},
year = {2016},
date = {2016-07-01},
booktitle = {American Control Conference},
pages = {2617-2622},
address = {Boston, MA, USA},
abstract = {A fundamental component in the z-axis feedback loop of an atomic force microscope (AFM) operated in dynamic mode is the lock-in amplifier to obtain amplitude and phase of the high-frequency cantilever deflection signal. While this narrowband demodulation technique is capable of filtering noise far away from the carrier and modulation frequency, its performance is ultimately bounded by the bandwidth of its low-pass filter which is employed to suppress the frequency component at twice the carrier frequency. Moreover, multiple eigenmodes and higher harmonics are used for imaging in modern multifrequency AFMs, which necessitates multiple lock-in amplifiers to recover the respective amplitude and phase information. We propose to estimate amplitude and phase of multiple frequency components with a linear time-varying Kalman filter which allows for an efficient implementation on a Field Programmable Gate Array (FPGA). While experimental results for the single mode case have already proven to increase the imaging bandwidth in tapping-mode AFM, multifrequency simulations promise further improvement in imaging flexibility. },
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
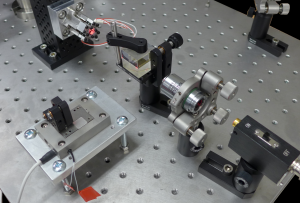
A. J. Fleming; B. S. Routley; J. L. Holdsworth
A Closed-Loop Phase-Locked Interferometer for Wide Bandwidth Position Sensing Proceedings Article
In: IEEE Multi-conference on Systems and Control, Sydney, 2015.
@inproceedings{C15a,
title = {A Closed-Loop Phase-Locked Interferometer for Wide Bandwidth Position Sensing},
author = {A. J. Fleming and B. S. Routley and J. L. Holdsworth},
year = {2015},
date = {2015-12-01},
booktitle = {IEEE Multi-conference on Systems and Control},
address = {Sydney},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
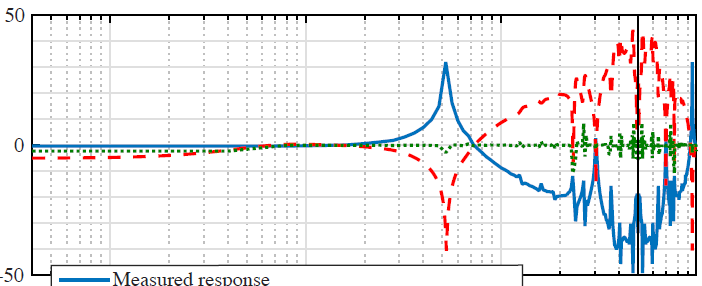
Y. R. Teo; A. A. Eielsen; A. J. Fleming
Model-less FIR Repetitive Control with consideration of uncertainty Proceedings Article
In: IEEE Multiconference on Systems and Control, Sydney, 2015.
@inproceedings{C15c,
title = {Model-less FIR Repetitive Control with consideration of uncertainty},
author = {Y. R. Teo and A. A. Eielsen and A. J. Fleming},
year = {2015},
date = {2015-12-01},
booktitle = {IEEE Multiconference on Systems and Control},
address = {Sydney},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
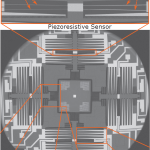
M. Maroufi; Y. K. Yong; S. O. R. Moheimani
Design and Control of a MEMS Nanopositioner with Bulk Piezoresistive Sensors Proceedings Article
In: IEEE Multiconference on Systems and Control, Sydney, Australia, 2015.
@inproceedings{Maroufi2015,
title = {Design and Control of a MEMS Nanopositioner with Bulk Piezoresistive Sensors},
author = {M. Maroufi and Y. K. Yong and S. O. R. Moheimani },
url = {http://www.eng.newcastle.edu.au/~yy582/Papers/Maroufi2015.pdf},
year = {2015},
date = {2015-09-01},
booktitle = {IEEE Multiconference on Systems and Control, Sydney, Australia},
abstract = {A 2 degree of freedom microelectromechanical system (MEMS) nanopositioner is presented in this paper. The nanopositioner is fabricated using a standard silicon-on-insulator process. The device demonstrates a bidirectional displacement in two orthogonal directions. As the displacement sensing mechanism, bulk piezoresistivity of tilted clamped-guided beams is exploited. The characterization reveals more than 15 μm displacement range and an in-plane bandwidth of above 3.6 kHz in both axes. The piezoresistive sensors provide a bandwidth which is more than ten times larger than the stage's resonant frequency. To evaluate the sensor performance in closed-loop, an integral resonant controller together with an integral tracking controller are implemented where piezoresistive sensor outputs are used as measurement. The controlled nanopositioner is used for imaging in an atomic force microscope.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
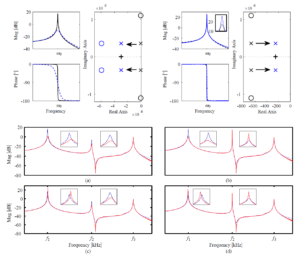
M. G. Ruppert; S. O. R. Moheimani
Multi-Mode Q Control in Multifrequency Atomic Force Microscopy Proceedings Article
In: ASME International Design Engineering Technical Conferences & Computers and Information in Engineering Conference, pp. V004T09A009, Boston, Massachusetts, USA, 2015.
@inproceedings{Ruppert2015,
title = {Multi-Mode Q Control in Multifrequency Atomic Force Microscopy},
author = {M. G. Ruppert and S. O. R. Moheimani},
doi = {10.1115/DETC2015-46989},
year = {2015},
date = {2015-08-01},
booktitle = {ASME International Design Engineering Technical Conferences & Computers and Information in Engineering Conference},
pages = {V004T09A009},
address = {Boston, Massachusetts, USA},
abstract = {Various Atomic Force Microscopy (AFM) modes have emerged which rely on the excitation and detection of multiple eigenmodes of the microcantilever. The conventional control loops employed in multifrequency AFM (MF-AFM) such as bimodal imaging where the fundamental mode is used to map the topography and a higher eigenmode is used to map sample material properties only focus on maintaining low bandwidth signals such as amplitude and/ or frequency shift. However, the ability to perform additional high bandwidth control of the quality (Q) factor of the participating modes is believed to be imperative to unfolding the full potential of these methods. This can be achieved by employing a multi-mode Q control approach utilizing positive position feedback. The controller exhibits remarkable performance in arbitrarily modifying the Q factor of multiple eigenmodes as well as guaranteed stability properties when used on flexible structures with collocated actuators and sensors. A controller design method based on pole placement optimization is proposed for setting an arbitrary on-resonance Q factor of the participating eigenmodes. Experimental results using bimodal AFM imaging on a two component polymer sample are presented.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Y. K. Yong; S. O. R. Moheimani
Control of vertical axis of a video-speed AFM nanopositioner (Invited Paper) Proceedings Article
In: American Control Conference, Chicago, USA, pp. 3473-3477, 2015.
@inproceedings{Yong20153473,
title = {Control of vertical axis of a video-speed AFM nanopositioner (Invited Paper)},
author = {Y. K. Yong and S. O. R. Moheimani},
year = {2015},
date = {2015-07-01},
booktitle = {American Control Conference, Chicago, USA},
journal = {Proceedings of the American Control Conference},
volume = {2015-July},
pages = {3473-3477},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
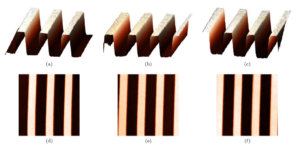
M. G. Ruppert; S. O. R. Moheimani
Novel Reciprocal Self-Sensing Techniques for Tapping-Mode Atomic Force Microscopy Proceedings Article
In: 19th IFAC World Congress, Cape Town, South Africa, 2014.
@inproceedings{Ruppert2014,
title = {Novel Reciprocal Self-Sensing Techniques for Tapping-Mode Atomic Force Microscopy},
author = {M. G. Ruppert and S. O. R. Moheimani},
doi = {https://doi.org/10.3182/20140824-6-ZA-1003.00376},
year = {2014},
date = {2014-08-24},
booktitle = {19th IFAC World Congress},
address = {Cape Town, South Africa},
abstract = {We evaluate two novel reciprocal self-sensing methods for tapping-mode atomic
force microscopy (TM-AFM) utilizing charge measurement and charge actuation, respectively.
A microcantilever, which can be batch fabricated through a standard microelectromechanical
system (MEMS) process, is coated with a single piezoelectric layer and simultaneously used for
actuation and deflection sensing. The setup enables the elimination of the optical beam deflection
technique which is commonly used to measure the cantilever oscillation amplitude. The voltage
to charge and charge to voltage transfer functions reveal a high amount of capacitive feedthrough
which degrades the dynamic range of the sensors significantly. A feedforward control technique
is employed to cancel the feedthrough and increase the dynamic range from less than 1 dB
to approximately 30 dB. Experiments show that the conditioned self-sensing schemes achieve
an excellent signal-to-noise ratio and can therefore be used to provide the feedback signal for
TM-AFM imaging.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
force microscopy (TM-AFM) utilizing charge measurement and charge actuation, respectively.
A microcantilever, which can be batch fabricated through a standard microelectromechanical
system (MEMS) process, is coated with a single piezoelectric layer and simultaneously used for
actuation and deflection sensing. The setup enables the elimination of the optical beam deflection
technique which is commonly used to measure the cantilever oscillation amplitude. The voltage
to charge and charge to voltage transfer functions reveal a high amount of capacitive feedthrough
which degrades the dynamic range of the sensors significantly. A feedforward control technique
is employed to cancel the feedthrough and increase the dynamic range from less than 1 dB
to approximately 30 dB. Experiments show that the conditioned self-sensing schemes achieve
an excellent signal-to-noise ratio and can therefore be used to provide the feedback signal for
TM-AFM imaging.
S. P. Wadikhaye; Y. K. Yong; S. O. R. Moheimani
Design and characterisation of a serial-kinematic nanopositioner for high-speed AFM (Invited Paper) Proceedings Article
In: IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Besancon, France, pp. 210-215, 2014.
@inproceedings{Wadikhaye2014210,
title = {Design and characterisation of a serial-kinematic nanopositioner for high-speed AFM (Invited Paper)},
author = {S. P. Wadikhaye and Y. K. Yong and S. O. R. Moheimani},
doi = {10.1109/AIM.2014.6878080},
year = {2014},
date = {2014-01-01},
booktitle = {IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Besancon, France},
journal = {IEEE/ASME International Conference on Advanced Intelligent Mechatronics, AIM},
pages = {210-215},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
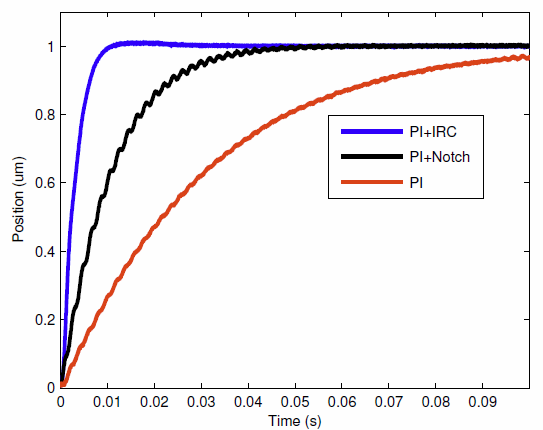
A. J. Fleming; K. K. Leang
An Experimental Comparison of PI, Inversion, and Damping Control for High Performance Nanopositioning Proceedings Article
In: Proc. IEEE American Control Conference, Washington, DC, 2013.
@inproceedings{C13b,
title = {An Experimental Comparison of PI, Inversion, and Damping Control for High Performance Nanopositioning},
author = {A. J. Fleming and K. K. Leang},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C13b.pdf},
year = {2013},
date = {2013-01-01},
booktitle = {Proc. IEEE American Control Conference},
address = {Washington, DC},
crossref = {(Invited Session)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
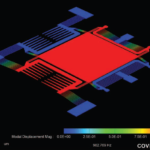
Y. K. Yong; A. G. Fowler; A. Mohammadi; S. O. R. Moheimani
Control of a MEMS nanopositioner for atomic force microscopy (Invited Paper) Proceedings Article
In: Proc. IFAC Symposium on Mehatronic Systems, Hangzhou, China, pp. 375-382, 2013.
@inproceedings{Yong2013375,
title = {Control of a MEMS nanopositioner for atomic force microscopy (Invited Paper)},
author = {Y. K. Yong and A. G. Fowler and A. Mohammadi and S. O. R. Moheimani},
doi = {10.3182/20130410-3-CN-2034.00038},
year = {2013},
date = {2013-01-01},
booktitle = {Proc. IFAC Symposium on Mehatronic Systems, Hangzhou, China},
journal = {IFAC Proceedings Volumes (IFAC-PapersOnline)},
pages = {375-382},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
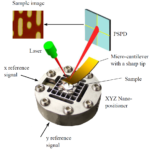
Y. K. Yong; A. Bazaei; S. O. R. Moheimani
Control of a high-speed nanopositioner for Lissajous-scan video-rate AFM Proceedings Article
In: Australian Control Conference, Perth, Australia, pp. 171-176, 2013.
@inproceedings{Yong2013171,
title = {Control of a high-speed nanopositioner for Lissajous-scan video-rate AFM},
author = {Y. K. Yong and A. Bazaei and S. O. R. Moheimani},
doi = {10.1109/AUCC.2013.6697268},
year = {2013},
date = {2013-01-01},
booktitle = {Australian Control Conference, Perth, Australia},
journal = {2013 3rd Australian Control Conference, AUCC 2013},
pages = {171-176},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
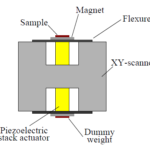
Y. K. Yong; S. O. R. Moheimani
A Z-scanner design for high-speed scanning probe microscopy (Invited Paper) Proceedings Article
In: IEEE International Conference on Robotics and Automation, St. Paul, MN, USA, pp. 4780-4785, 2012.
@inproceedings{Yong20124780,
title = {A Z-scanner design for high-speed scanning probe microscopy (Invited Paper)},
author = {Y. K. Yong and S. O. R. Moheimani},
doi = {10.1109/ICRA.2012.6224758},
year = {2012},
date = {2012-05-01},
booktitle = {IEEE International Conference on Robotics and Automation, St. Paul, MN, USA},
journal = {Proceedings - IEEE International Conference on Robotics and Automation},
pages = {4780-4785},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Y. K. Yong; A. Bazaei; S. O. R. Moheimani; F. Allgower
Design and control of a novel non-raster scan pattern for fast scanning probe microscopy (Invited Paper) Proceedings Article
In: IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Kaohsiung, Taiwan, pp. 456-461, 2012.
@inproceedings{Yong2012456,
title = {Design and control of a novel non-raster scan pattern for fast scanning probe microscopy (Invited Paper)},
author = {Y. K. Yong and A. Bazaei and S. O. R. Moheimani and F. Allgower},
doi = {10.1109/AIM.2012.6266062},
year = {2012},
date = {2012-01-01},
booktitle = {IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Kaohsiung, Taiwan},
journal = {IEEE/ASME International Conference on Advanced Intelligent Mechatronics, AIM},
pages = {456-461},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
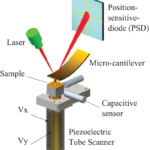
B. Bhikkaji; Y. K. Yong; I. A. Mahmood; S. O. R. Moheimani
Multivariable control designs for piezoelectric tubes (Invited Paper) Proceedings Article
In: IFAC World Congress, Milan, Italy, pp. 2030-2035, 2011.
@inproceedings{Bhikkaji20112030,
title = {Multivariable control designs for piezoelectric tubes (Invited Paper)},
author = {B. Bhikkaji and Y. K. Yong and I. A. Mahmood and S. O. R. Moheimani},
doi = {10.3182/20110828-6-IT-1002.01745},
year = {2011},
date = {2011-08-01},
booktitle = {IFAC World Congress, Milan, Italy},
journal = {IFAC Proceedings Volumes (IFAC-PapersOnline)},
volume = {18},
pages = {2030-2035},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
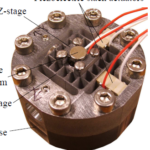
Y. K. Yong; B. Bhikkaji; S. O. R. Moheimani
Analog control of a high-speed atomic force microscope scanner Proceedings Article
In: IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Budapest, Hungary., pp. 646-651, 2011.
@inproceedings{Yong2011646,
title = {Analog control of a high-speed atomic force microscope scanner},
author = {Y. K. Yong and B. Bhikkaji and S. O. R. Moheimani},
doi = {10.1109/AIM.2011.6027103},
year = {2011},
date = {2011-07-01},
booktitle = {IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Budapest, Hungary.},
journal = {IEEE/ASME International Conference on Advanced Intelligent Mechatronics, AIM},
pages = {646-651},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Y. K. Yong; S. O. R. Moheimani; I. R. Petersen
A Non-raster Scan Method for High-speed SPM Proceedings Article
In: IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Budapest, Hungary, 2011.
@inproceedings{Yong2011,
title = {A Non-raster Scan Method for High-speed SPM},
author = {Y. K. Yong and S. O. R. Moheimani and I. R. Petersen },
year = {2011},
date = {2011-07-01},
booktitle = {IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Budapest, Hungary},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
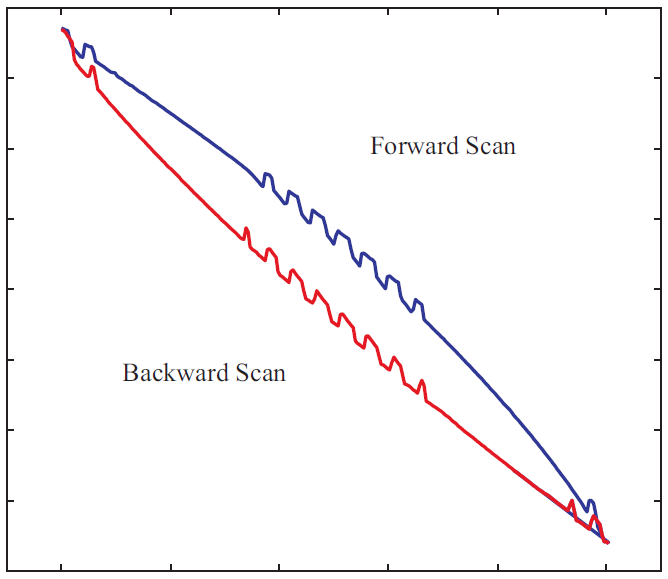
A. J. Fleming
A method for reducing piezoelectric non-linearity in scanning probe microscope images Proceedings Article
In: Proc. American Control Conference, pp. 2861–2866, San Francisco, CA, 2011.
@inproceedings{C11a,
title = {A method for reducing piezoelectric non-linearity in scanning probe microscope images},
author = {A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C11a.pdf},
year = {2011},
date = {2011-01-01},
booktitle = {Proc. American Control Conference},
pages = {2861--2866},
address = {San Francisco, CA},
crossref = {(Invited Session)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
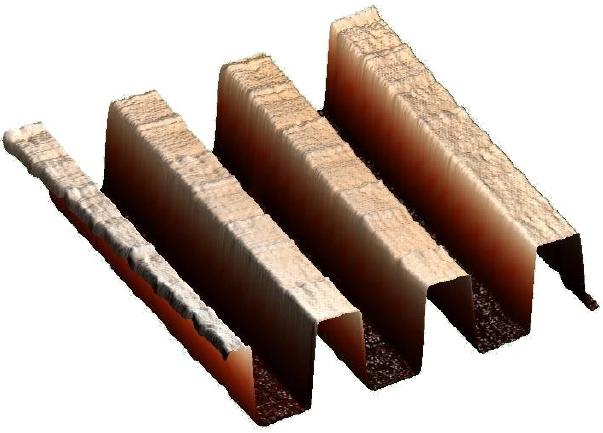
M. Fairbairn; S. O. R. Moheimani; A. J. Fleming
Improving the scan rate and image quality in tapping mode atomic force microscopy with piezoelectric shunt control Proceedings Article
In: Proc. Australian Control Conference, Melbourne, Australia, 2011.
@inproceedings{C11d,
title = {Improving the scan rate and image quality in tapping mode atomic force microscopy with piezoelectric shunt control},
author = {M. Fairbairn and S. O. R. Moheimani and A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C11d.pdf},
year = {2011},
date = {2011-01-01},
booktitle = {Proc. Australian Control Conference},
address = {Melbourne, Australia},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
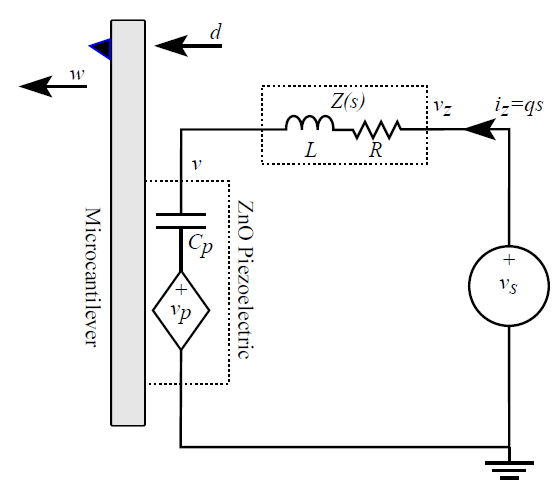
M. Fairbairn; S. O. R. Moheimani; A. J. Fleming
Passive piezoelectric shunt control of an atomic force microscope microcantilever Proceedings Article
In: Proc. IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Budapest, Hungary, 2011.
@inproceedings{C11b,
title = {Passive piezoelectric shunt control of an atomic force microscope microcantilever},
author = {M. Fairbairn and S. O. R. Moheimani and A. J. Fleming},
year = {2011},
date = {2011-01-01},
booktitle = {Proc. IEEE/ASME International Conference on Advanced Intelligent Mechatronics},
address = {Budapest, Hungary},
crossref = {(Invited Session)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
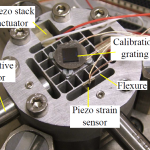
Y. K. Yong; A. J. Fleming; S. O. R. Moheimani
Vibration and tracking control of a flexure-guided nanopositioner using a piezoelectric strain sensor (Invited Paper) Proceedings Article
In: Proc. International Conference on Manipulation, Manufacturing and Measurement on the Nanoscale, Changchun, China, 2011.
@inproceedings{C11c,
title = {Vibration and tracking control of a flexure-guided nanopositioner using a piezoelectric strain sensor (Invited Paper)},
author = {Y. K. Yong and A. J. Fleming and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C11c.pdf},
year = {2011},
date = {2011-01-01},
booktitle = {Proc. International Conference on Manipulation, Manufacturing and Measurement on the Nanoscale},
address = {Changchun, China},
crossref = {(Invited Session)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
A. Bazaei; Y. K. Yong; S. O. R. Moheimani; A. Sebastian
Tracking control of a novel AFM scanner using signal transformation method (Invited Paper) Proceedings Article
In: Proc. IFAC Symposium on Mechatronic System, Cambridge, MA, USA, pp. 84-89, 2010.
@inproceedings{Bazaei201084,
title = {Tracking control of a novel AFM scanner using signal transformation method (Invited Paper)},
author = {A. Bazaei and Y. K. Yong and S. O. R. Moheimani and A. Sebastian},
doi = {10.3182/20100913-3-US-2015.00021},
year = {2010},
date = {2010-09-01},
booktitle = {Proc. IFAC Symposium on Mechatronic System, Cambridge, MA, USA},
journal = {IFAC Proceedings Volumes (IFAC-PapersOnline)},
pages = {84-89},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
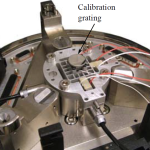
Y. K. Yong; S. O. R. Moheimani
A compact XYZ scanner for fast atomic force microscopy in constant force contact mode Proceedings Article
In: IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Montreal, Canada, pp. 225-230, 2010.
@inproceedings{Yong2010225,
title = {A compact XYZ scanner for fast atomic force microscopy in constant force contact mode},
author = {Y. K. Yong and S. O. R. Moheimani},
url = {http://www.eng.newcastle.edu.au/~yy582/Papers/Yong%202010%20-%20compact%20scanner.pdf},
doi = {10.1109/AIM.2010.5695880},
year = {2010},
date = {2010-07-01},
booktitle = {IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Montreal, Canada},
journal = {IEEE/ASME International Conference on Advanced Intelligent Mechatronics, AIM},
pages = {225-230},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Y. K. Yong; B. Ahmed; S. O. R. Moheimani
A 12-electrode piezoelectric tube scanner for fast atomic force microscopy (Invited Paper) Proceedings Article
In: American Control Conference, Baltimore, Maryland, USA, pp. 4957-4962, 2010.
@inproceedings{Yong20104957,
title = {A 12-electrode piezoelectric tube scanner for fast atomic force microscopy (Invited Paper)},
author = {Y. K. Yong and B. Ahmed and S. O. R. Moheimani},
year = {2010},
date = {2010-06-01},
booktitle = {American Control Conference, Baltimore, Maryland, USA},
journal = {Proceedings of the 2010 American Control Conference, ACC 2010},
pages = {4957-4962},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
S. Kuiper; A. J. Fleming; G. Schitter
Dual actuation for high-speed atomic force microscopy Proceedings Article
In: Proc. IFAC Symposium on Mechatronic Systems, pp. 220–226, Boston, MA, 2010.
@inproceedings{C10d,
title = {Dual actuation for high-speed atomic force microscopy},
author = {S. Kuiper and A. J. Fleming and G. Schitter},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C10d.pdf},
year = {2010},
date = {2010-01-01},
booktitle = {Proc. IFAC Symposium on Mechatronic Systems},
pages = {220--226},
address = {Boston, MA},
crossref = {(Invited Session)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
A. J. Fleming
Ultra-fast dual-stage vertical positioning for high performance SPMs Proceedings Article
In: Proc. American Control Conference, pp. 4975–4980, Baltimore, MD, 2010.
@inproceedings{C10b,
title = {Ultra-fast dual-stage vertical positioning for high performance SPMs},
author = {A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C10b.pdf},
year = {2010},
date = {2010-01-01},
booktitle = {Proc. American Control Conference},
pages = {4975--4980},
address = {Baltimore, MD},
crossref = {(Invited Session)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
A. J. Fleming; S. S. Aphale; S. O. R. Moheimani
A new robust damping and tracking controller for SPM positioning stages Proceedings Article
In: Proc. American Control Conference, St. Louis, MO, 2009.
@inproceedings{C09a,
title = {A new robust damping and tracking controller for SPM positioning stages},
author = {A. J. Fleming and S. S. Aphale and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C09a.pdf},
year = {2009},
date = {2009-01-01},
booktitle = {Proc. American Control Conference},
address = {St. Louis, MO},
crossref = {(Invited Session)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
A. J. Fleming
High-speed vertical positioning for contact-mode atomic force microscopy Proceedings Article
In: Proc. IEEE/ASME International Conference on Advanced Intelligent Mechatronics, pp. 522-527, Singapore, 2009.
@inproceedings{C09c,
title = {High-speed vertical positioning for contact-mode atomic force microscopy},
author = {A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C09c.pdf},
year = {2009},
date = {2009-01-01},
booktitle = {Proc. IEEE/ASME International Conference on Advanced Intelligent Mechatronics},
pages = {522-527},
address = {Singapore},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
S. O. R. Moheimani; Y. K. Yong
A new piezoelectric tube scanner for simultaneous sensing and actuation (Invited Paper) Proceedings Article
In: American Control Conference, St. Louis, Missouri, USA, pp. 2249-2253, 2009.
@inproceedings{RezaMoheimani20092249,
title = {A new piezoelectric tube scanner for simultaneous sensing and actuation (Invited Paper)},
author = {S. O. R. Moheimani and Y. K. Yong},
doi = {10.1109/ACC.2009.5160032},
year = {2009},
date = {2009-01-01},
booktitle = {American Control Conference, St. Louis, Missouri, USA},
journal = {Proceedings of the American Control Conference},
pages = {2249-2253},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
A. J. Fleming; K. K. Leang
Evaluation of charge drives for scanning probe microscope positioning stages Proceedings Article
In: Proc. American Control Conference, pp. 2028–2033, Seattle, WA, 2008.
@inproceedings{C08a,
title = {Evaluation of charge drives for scanning probe microscope positioning stages},
author = {A. J. Fleming and K. K. Leang},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C08a.pdf},
year = {2008},
date = {2008-01-01},
booktitle = {Proc. American Control Conference},
pages = {2028--2033},
address = {Seattle, WA},
crossref = {(Invited Session)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
K. K. Leang; A. J. Fleming
High-speed serial-kinematic AFM scanner: Design and drive considerations Proceedings Article
In: Proc. American Control Conference, pp. 3188–3193, Seattle, WA, 2008.
@inproceedings{C08b,
title = {High-speed serial-kinematic AFM scanner: Design and drive considerations},
author = {K. K. Leang and A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C08b.pdf},
year = {2008},
date = {2008-01-01},
booktitle = {Proc. American Control Conference},
pages = {3188--3193},
address = {Seattle, WA},
crossref = {(Invited Session)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
J. Maess; A. J. Fleming; F. Allgöwer
Model-based vibration suppression in piezoelectric tube scanners through induced voltage feedback Proceedings Article
In: Proc. American Control Conference, pp. 2022–2027, Seattle, WA, 2008.
@inproceedings{C08c,
title = {Model-based vibration suppression in piezoelectric tube scanners through induced voltage feedback},
author = {J. Maess and A. J. Fleming and F. Allgöwer},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C08c.pdf},
year = {2008},
date = {2008-01-01},
booktitle = {Proc. American Control Conference},
pages = {2022--2027},
address = {Seattle, WA},
crossref = {(Invited Session)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
A. J. Fleming; A. G. Wills
Optimal input signals for bandlimited scanning systems Proceedings Article
In: Proc. IFAC World Congress, pp. 11805-11810, Seoul, Korea, 2008.
@inproceedings{C08d,
title = {Optimal input signals for bandlimited scanning systems},
author = {A. J. Fleming and A. G. Wills},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C08d.pdf},
year = {2008},
date = {2008-01-01},
booktitle = {Proc. IFAC World Congress},
pages = {11805-11810},
address = {Seoul, Korea},
crossref = {(Invited Session)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
S. S. Aphale; S. O. R. Moheimani; A. J. Fleming
Dominant resonant mode damping of a piezoelectric tube nanopositioner using optimal sensorless shunts Proceedings Article
In: Proc. American Control Conference, New York, NY, 2007.
@inproceedings{C07c,
title = {Dominant resonant mode damping of a piezoelectric tube nanopositioner using optimal sensorless shunts},
author = {S. S. Aphale and S. O. R. Moheimani and A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C07c.pdf},
year = {2007},
date = {2007-01-01},
booktitle = {Proc. American Control Conference},
address = {New York, NY},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
A. J. Fleming; A. G. Wills; S. O. R. Moheimani
Sensor fusion for improved control of piezoelectric tube scanners Proceedings Article
In: Proc. IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Zurich, Switzerland, 2007.
@inproceedings{C07a,
title = {Sensor fusion for improved control of piezoelectric tube scanners},
author = {A. J. Fleming and A. G. Wills and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C07a.pdf},
year = {2007},
date = {2007-01-01},
booktitle = {Proc. IEEE/ASME International Conference on Advanced Intelligent Mechatronics},
address = {Zurich, Switzerland},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
J. Maess; A. J. Fleming; F. Allgöwer
Simulation of piezoelectric tube actuators by reduced finite element models for controller design Proceedings Article
In: Proc. American Control Conference, New York, NY, 2007.
@inproceedings{C07b,
title = {Simulation of piezoelectric tube actuators by reduced finite element models for controller design},
author = {J. Maess and A. J. Fleming and F. Allgöwer},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C07b.pdf},
year = {2007},
date = {2007-01-01},
booktitle = {Proc. American Control Conference},
address = {New York, NY},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
B. Bhikkaji; M. Ratnam; A. J. Fleming; S. O. R. Moheimani
High-performance control of a PZT Scanner Proceedings Article
In: Proc. IFAC Symposium on Mechatronic Systems, Heidelberg, Germany, 2006.
@inproceedings{C06c,
title = {High-performance control of a PZT Scanner},
author = {B. Bhikkaji and M. Ratnam and A. J. Fleming and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C06c.pdf},
year = {2006},
date = {2006-01-01},
booktitle = {Proc. IFAC Symposium on Mechatronic Systems},
address = {Heidelberg, Germany},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
M. Ratnam; B. Bhikkaji; A. J. Fleming; S. O. R. Moheimani
PPF control of a piezoelectric tube scanner Proceedings Article
In: Proc. IEEE Conference on Decision and Control and European Control Conference, Seville, Spain, 2005.
@inproceedings{C05c,
title = {PPF control of a piezoelectric tube scanner},
author = {M. Ratnam and B. Bhikkaji and A. J. Fleming and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C05c.pdf},
year = {2005},
date = {2005-01-01},
booktitle = {Proc. IEEE Conference on Decision and Control and European Control Conference},
address = {Seville, Spain},
crossref = {(Invited Session)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
A. J. Fleming; S. O. R. Moheimani
Sensor-less vibration suppression and scan compensation for piezoelectric tube nanopositioners Proceedings Article
In: Proc. IEEE Conference on Decision and Control and European Control Conference, Seville, Spain, 2005.
@inproceedings{C05b,
title = {Sensor-less vibration suppression and scan compensation for piezoelectric tube nanopositioners},
author = {A. J. Fleming and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C05b.pdf},
year = {2005},
date = {2005-01-01},
booktitle = {Proc. IEEE Conference on Decision and Control and European Control Conference},
address = {Seville, Spain},
crossref = {(Invited Session)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}