Scanning Probe Microscopy
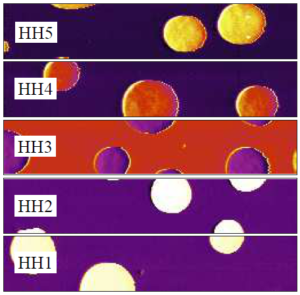
Probe Based Lithography
Probe based lithography involves creating nanometer sized features from photoresist and metal on conducting and semiconducting substrates. Near field optical, electrical and thermal fields are employed in combination with evaporation, etching and electroplating to provide high-speed alternatives for mask-less nanofabrication.

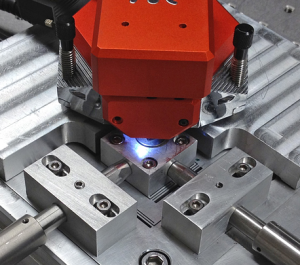
Nanopositioning
A nanopositioner is a electromechanical device for moving objects in three dimensions with atomic, or sub-atomic resolution. Nanopositioners are employed in applications such as imaging, fabrication and optics. This field encompasses mechanical design, sensor design, and control theory. More details.
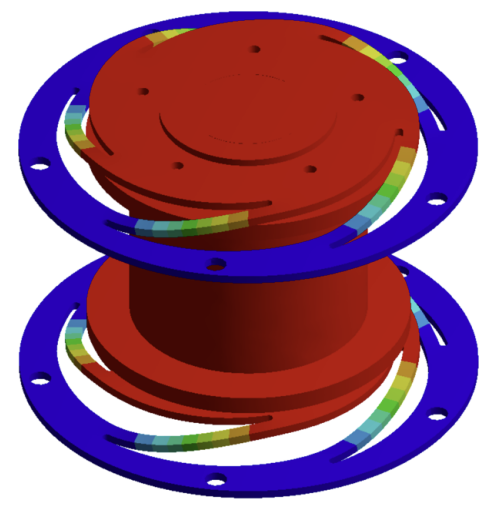
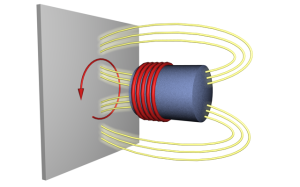
Electroactive Optics
Piezoelectric actuators can be combined with mirrors, lenses and objectives to actively control the path and properties of an optical field or laser beam. High speed electro-optics are required for precision lasers, maskless lithography, and microscopy.
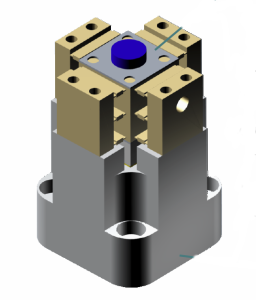
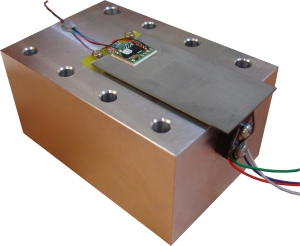
Precision Sensors
This project aims to study the fundamental limitations of capacitive, optical and magnetic position sensors. New techniques are under development to provide sub-atomic resolution over extremely wide bandwidth.
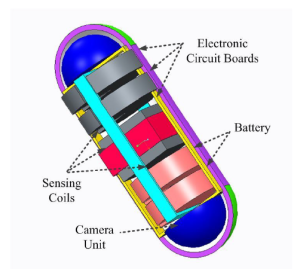
Biomedical Devices
An endoscopic pill robot is being developed for noninvasive imaging and intervention. The robot can be swallowed and includes power transmission, 6-Dimensional localization, and locomotion.
Piezo Actuators and Amplifiers
Piezo bender actuator with integrated 200V power electronics
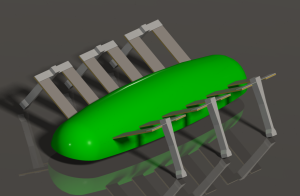
Piezo Robotics
Due to their compact size and high efficiency, piezoelectric actuators are ideal for micro-actuation in bio-inspired robotics. This project is developing actuators and mechanics for a piezoelectric dragon-fly robot.
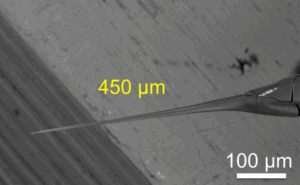
Electrohydrodynamic Fabrication of Silica Microtips for SERS-Based Microscale pH Sensing Conference
International Conference on Nanoscience and Nanotechnology, 2026.
Free-templated Microfabrication of Hydrogel Microneedles Using Electrohydrodynamic Technique for Transdermal Drug Delivery Conference
The 29th International Conference on Miniaturized Systems for Chemistry and Life Sciences - Micro-Total Analysis Systems (uTas), Adelaide, 2 - 6 November, 2025, 2025.
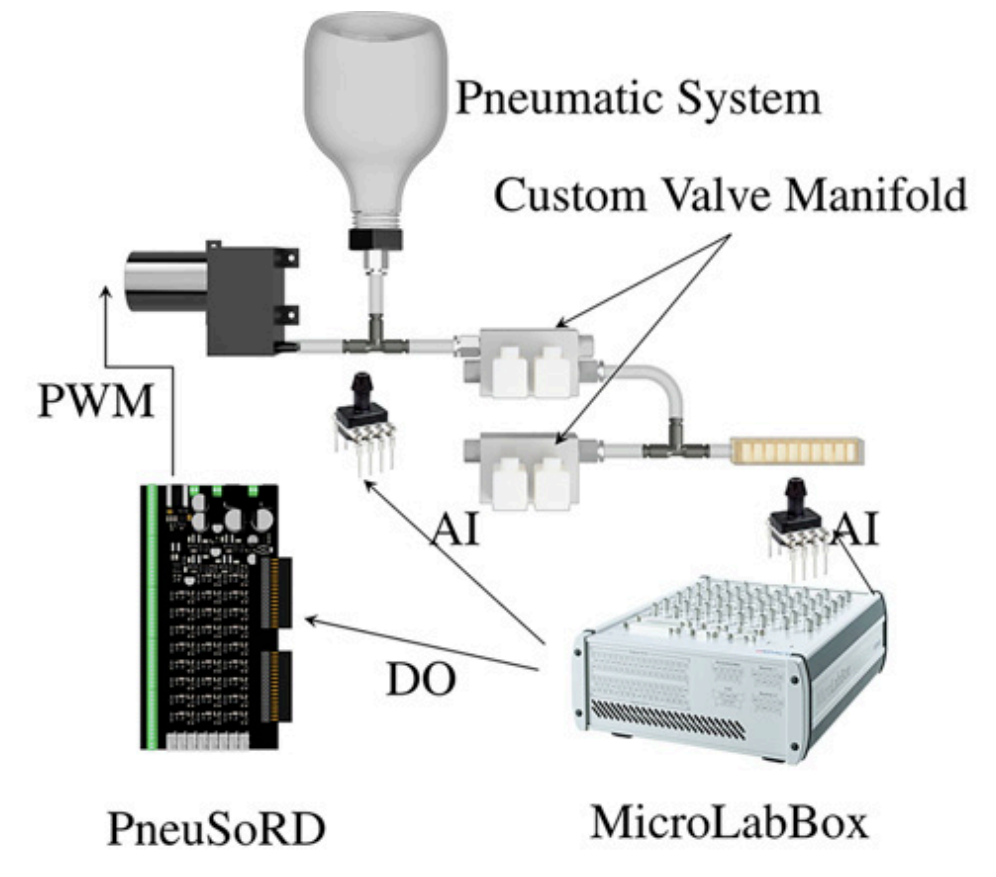
Multivalve Configuration for Soft Robotics: Overcoming the Trade-Off Between Speed and Accuracy in Pneumatic Systems Journal Article
In: Robotics Reports, vol. 3, no. 1, pp. 54-64, 2025, ISSN: 2835-0111.
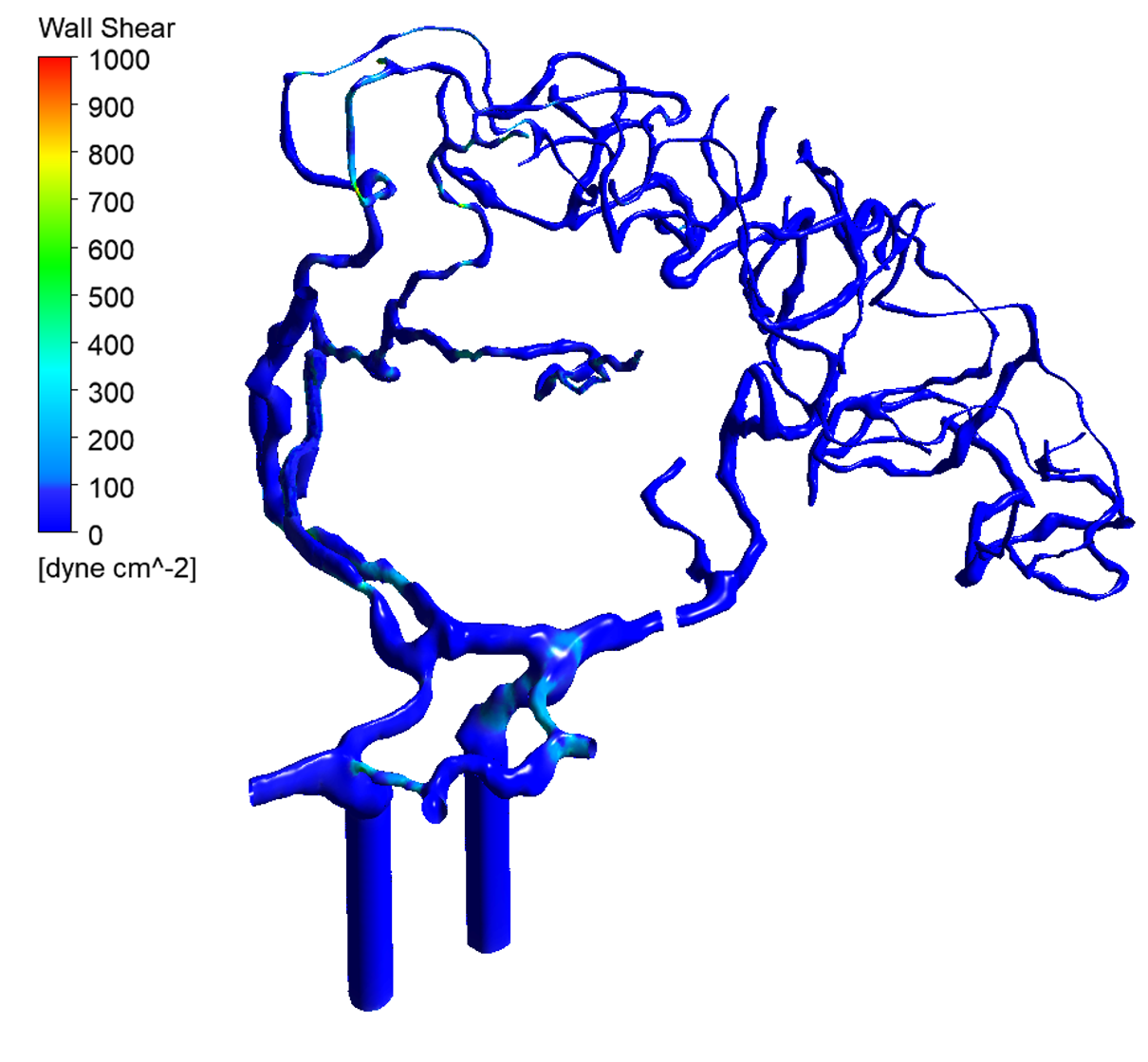
Shear Stress Targeted Delivery of Nitroglycerin to Brain Collaterals Improves Ischaemic Stroke Outcome Journal Article
In: Advanced Science, vol. e06276, 2025.
Electromagnetic Objective Lens Scanner: Design, Modeling and Characterization Best Paper Proceedings Article
In: International Conference on Manipulation, Automation and Robotics at Small Scales, West Lafayette, IN, USA, 2025, ISBN: 979-8-3315-9687-3, (Best Conference Paper Award).