2025
|
| 159. | 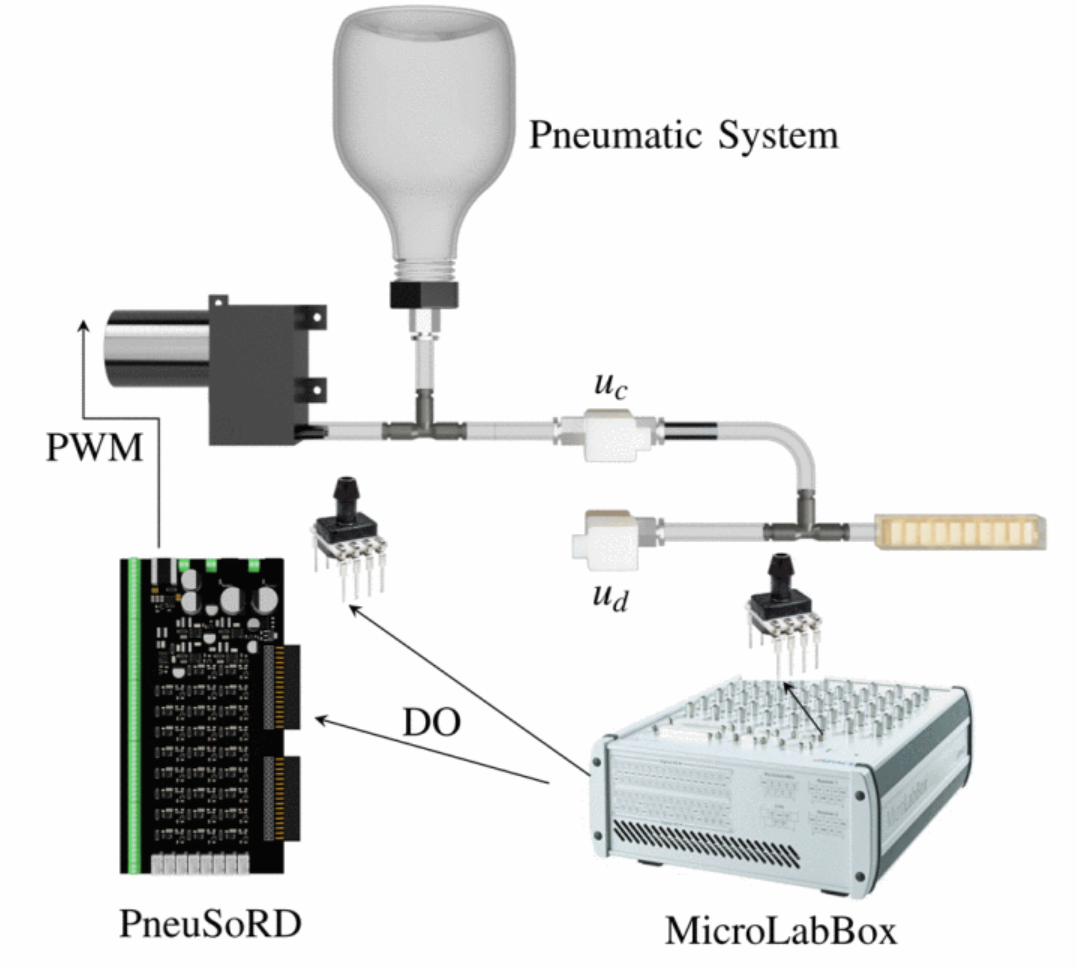 | T. R. Young; Y. K. Yong; A. J. Fleming Data-Driven Inverse Control of Pneumatic Soft Robotic Actuators with On-Off Valves: Simulated Performance Proceedings Article In: IEEE International Conference on Mechatronics, 2025. @inproceedings{nokey,
title = {Data-Driven Inverse Control of Pneumatic Soft Robotic Actuators with On-Off Valves: Simulated Performance},
author = {T. R. Young and Y. K. Yong and A. J. Fleming},
url = {https://ieeexplore-ieee-org.ezproxy.newcastle.edu.au/abstract/document/10934841},
doi = {10.1109/ICM62621.2025.10934841},
year = {2025},
date = {2025-02-28},
urldate = {2025-02-28},
booktitle = {IEEE International Conference on Mechatronics},
abstract = {This article describes a data-driven control method for fast and accurate pressure regulation of pneumatic soft robotic actuators with on-off valves. Due to the non-linearity and binary control input, linear controllers are not ideal for pressure regulation as they must be tuned conservatively, which results in a slow transient response. Alternatively, non-linear methods can provide a faster response time but are complicated by the need for an accurate model. This article proposes an inverse control approach, where the control action is parameterized by the valve on-time, and the system output is the cumulative change in pressure after the control action is complete and all system transients have decayed. This approach eliminates the need for a dynamic model and results in a small space of input-output combinations that can be measured from a calibration experiment. The result is a non-linear inverse controller that does not require a dynamic model. The proposed method is compared in simulation to a hysteresis controller with three different valve orifice diameters. Significant improvements to the pressure regulation and valve lifetime are observed. This method is expected to find applications in soft robotics where fast step changes and dynamic trajectories are required.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
This article describes a data-driven control method for fast and accurate pressure regulation of pneumatic soft robotic actuators with on-off valves. Due to the non-linearity and binary control input, linear controllers are not ideal for pressure regulation as they must be tuned conservatively, which results in a slow transient response. Alternatively, non-linear methods can provide a faster response time but are complicated by the need for an accurate model. This article proposes an inverse control approach, where the control action is parameterized by the valve on-time, and the system output is the cumulative change in pressure after the control action is complete and all system transients have decayed. This approach eliminates the need for a dynamic model and results in a small space of input-output combinations that can be measured from a calibration experiment. The result is a non-linear inverse controller that does not require a dynamic model. The proposed method is compared in simulation to a hysteresis controller with three different valve orifice diameters. Significant improvements to the pressure regulation and valve lifetime are observed. This method is expected to find applications in soft robotics where fast step changes and dynamic trajectories are required. |
| 158. | 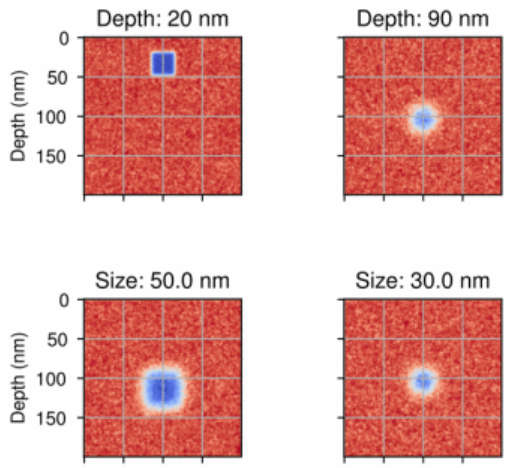 | B. J. Stanwell; Y. K. Yong; A. J. Fleming Feasibility of Nano Electrical Resistive Tomography for Subsurface Atomic Force Microscopy Proceedings Article In: IEEE International Conference on Mechatronics, 2025. @inproceedings{Stanwell2025,
title = {Feasibility of Nano Electrical Resistive Tomography for Subsurface Atomic Force Microscopy},
author = {B. J. Stanwell and Y. K. Yong and A. J. Fleming},
url = {https://ieeexplore-ieee-org.ezproxy.newcastle.edu.au/abstract/document/10934851},
doi = {10.1109/ICM62621.2025.10934851},
year = {2025},
date = {2025-02-28},
booktitle = {IEEE International Conference on Mechatronics},
abstract = {This article investigates the feasibility of using a dual-cantilever atomic force microscope for imaging the electrical properties of a sample below the surface. Principles from macro-scale electrical resistive tomography are adapted to utilize measurements from a dual-probe atomic force microscope. A deep-learning method is employed to perform the inversion process and construct the tomography. Simulation results demonstrate that electrical resistive tomography is possible at the nanometre scale but improvements to the inversion algorithms are needed before moving to experimental applications.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
This article investigates the feasibility of using a dual-cantilever atomic force microscope for imaging the electrical properties of a sample below the surface. Principles from macro-scale electrical resistive tomography are adapted to utilize measurements from a dual-probe atomic force microscope. A deep-learning method is employed to perform the inversion process and construct the tomography. Simulation results demonstrate that electrical resistive tomography is possible at the nanometre scale but improvements to the inversion algorithms are needed before moving to experimental applications. |
| 157. | 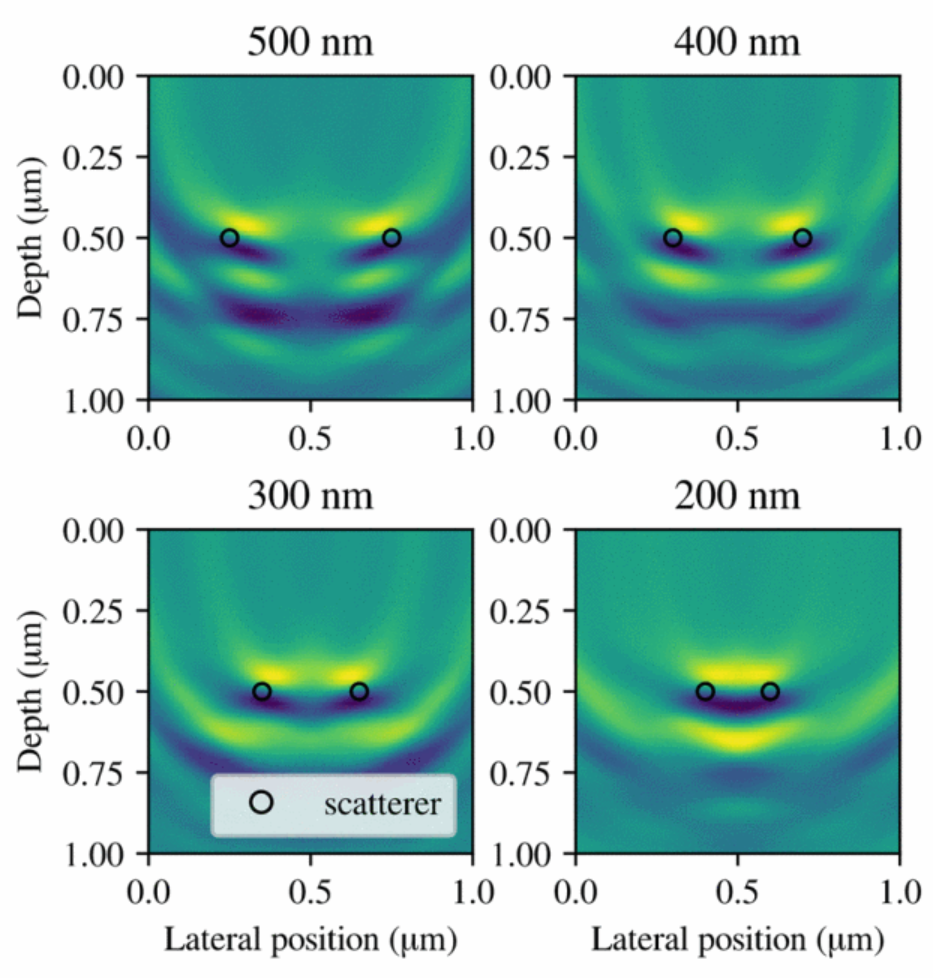 | C. J. Carlon; Y. K. Yong; A. J. Fleming Feasibility of Nano-Acoustic Subsurface Imaging for Atomic Force Microscopy Proceedings Article In: IEEE International Conference on Mechatronics (ICM), 2025. @inproceedings{Carlon2025,
title = {Feasibility of Nano-Acoustic Subsurface Imaging for Atomic Force Microscopy},
author = {C. J. Carlon and Y. K. Yong and A. J. Fleming},
url = {https://ieeexplore-ieee-org.ezproxy.newcastle.edu.au/abstract/document/10934819},
doi = {10.1109/ICM62621.2025.10934819},
year = {2025},
date = {2025-02-28},
booktitle = {IEEE International Conference on Mechatronics (ICM)},
abstract = {The feasibility of a new imaging regime for sub-surface Atomic Force Microscopy (AFM) is investigated using synthetic aperture focusing technique. This technique uses two Atomic Force Microscopy (AFM) probes to emit acoustic pulses and sense echoes. Unlike other existing subsurface AFM methods, Nano-Acoustic Subsurface AFM (NASAFM) provides cross-sectional images of a sample below the surface with depth information in the nanometre scale. In order to determine the best resolution, two ideal wideband AFM probes are considered in simulation. The results show that a 20 ps pulse with a bandwidth of 330 GHz was able to resolve two 50 nm discs, 500 nm below the surface, separated by 340 nm. Future work is needed to understand the relation between resolution and bandwidth, the optimal imaging parameters, and the sensing technique.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
The feasibility of a new imaging regime for sub-surface Atomic Force Microscopy (AFM) is investigated using synthetic aperture focusing technique. This technique uses two Atomic Force Microscopy (AFM) probes to emit acoustic pulses and sense echoes. Unlike other existing subsurface AFM methods, Nano-Acoustic Subsurface AFM (NASAFM) provides cross-sectional images of a sample below the surface with depth information in the nanometre scale. In order to determine the best resolution, two ideal wideband AFM probes are considered in simulation. The results show that a 20 ps pulse with a bandwidth of 330 GHz was able to resolve two 50 nm discs, 500 nm below the surface, separated by 340 nm. Future work is needed to understand the relation between resolution and bandwidth, the optimal imaging parameters, and the sensing technique. |
2021
|
| 156. |  | T. R. Young; M. S. Xavier; Y. K. Yong; A. J. Fleming A Control and Drive System for Pneumatic Soft Robots: PneuSoRD Proceedings Article In: International Conference on Intelligent Robots and Systems, Prague, Czech Republic , 2021, ISSN: 2153-0866. @inproceedings{Young2021,
title = {A Control and Drive System for Pneumatic Soft Robots: PneuSoRD},
author = {T. R. Young and M. S. Xavier and Y. K. Yong and A. J. Fleming },
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2022/03/C21b.pdf},
doi = {10.1109/IROS51168.2021.9635874},
issn = {2153-0866},
year = {2021},
date = {2021-09-27},
urldate = {2021-09-27},
booktitle = {International Conference on Intelligent Robots and Systems},
address = {Prague, Czech Republic },
abstract = {This article describes an open-source hardware platform for controlling pneumatic soft robotic systems and presents the comparison of control schemes with on-off and proportional valves. The Pneumatic Soft Robotics Driver (PneuSoRD) can be used with up to one pump and pressure accumulator, 26 on-off valves, and 5 proportional valves, any of which can be operated in open or closed-loop control using up to 12 sensor inputs, which allows for the simultaneous control of a large number of soft actuators. The electronic driver connects to a National Instruments myRIO controller or an Arduino Due with the use of an adapter shield. A library of pressure control algorithms in both LabVIEW and Simulink is provided that includes bang-bang control, hysteresis control and PID control using on-off or proportional valves. LabVIEW and Simulink provide user-friendly interfaces for rapid prototyping of control algorithms and real-time evaluation of pressure dynamics. The characteristics and performance of these control methods and pneumatic setups are evaluated to simplify the choice of valves and control algorithm for a given application. },
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
This article describes an open-source hardware platform for controlling pneumatic soft robotic systems and presents the comparison of control schemes with on-off and proportional valves. The Pneumatic Soft Robotics Driver (PneuSoRD) can be used with up to one pump and pressure accumulator, 26 on-off valves, and 5 proportional valves, any of which can be operated in open or closed-loop control using up to 12 sensor inputs, which allows for the simultaneous control of a large number of soft actuators. The electronic driver connects to a National Instruments myRIO controller or an Arduino Due with the use of an adapter shield. A library of pressure control algorithms in both LabVIEW and Simulink is provided that includes bang-bang control, hysteresis control and PID control using on-off or proportional valves. LabVIEW and Simulink provide user-friendly interfaces for rapid prototyping of control algorithms and real-time evaluation of pressure dynamics. The characteristics and performance of these control methods and pneumatic setups are evaluated to simplify the choice of valves and control algorithm for a given application. |
| 155. | 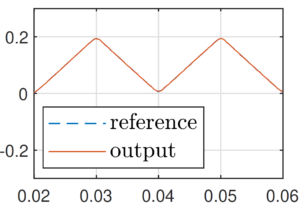 | T. Sieswerda; A. J. Fleming; T. Oomen Model-free Multi-variable Learning Control of a Five Axis Nanopositioning Stage Proceedings Article In: IEEE/ASME International Conference on Advanced Intelligent Mechatronics, pp. 1190-1194 , Delft, Netherlands, 2021, ISBN: 978-1-6654-4140-7. @inproceedings{C21a,
title = {Model-free Multi-variable Learning Control of a Five Axis Nanopositioning Stage},
author = {T. Sieswerda and A. J. Fleming and T. Oomen},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2022/01/C21a.pdf},
doi = {10.1109/AIM46487.2021.9517342},
isbn = {978-1-6654-4140-7},
year = {2021},
date = {2021-07-12},
urldate = {2020-07-12},
booktitle = {IEEE/ASME International Conference on Advanced Intelligent Mechatronics},
pages = {1190-1194 },
address = {Delft, Netherlands},
abstract = {This article compares the performance of recently introduced learning control methods on a 5-axis nanopositioning stage. Of these methods, the Smoothed Model-Free Inversionbased Iterative Control (SMF-IIC) method requires no modeling effort for effective tracking of repetitive trajectories and is readily applicable to multi-variable systems. Experimental results show that the tracking performance of the SMF-IIC method is similar to traditional learning control methods when applied to
a single axis of the nanopositioning stage. The SMF-IIC method is also found to be effective for reference tracking of two axes simultaneously.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
This article compares the performance of recently introduced learning control methods on a 5-axis nanopositioning stage. Of these methods, the Smoothed Model-Free Inversionbased Iterative Control (SMF-IIC) method requires no modeling effort for effective tracking of repetitive trajectories and is readily applicable to multi-variable systems. Experimental results show that the tracking performance of the SMF-IIC method is similar to traditional learning control methods when applied to
a single axis of the nanopositioning stage. The SMF-IIC method is also found to be effective for reference tracking of two axes simultaneously. |
2020
|
| 154. | 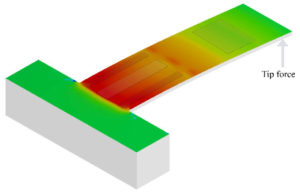 | N. F. S. de Bem; M. G. Ruppert; Y. K. Yong; A. J. Fleming Integrated force and displacement sensing in active microcantilevers for off-resonance tapping mode atomic force microscopy Proceedings Article In: International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS), pp. 1-6, 2020, (This work was supported by the Australian Research Council Discovery Project DP170101813). @inproceedings{C20c,
title = {Integrated force and displacement sensing in active microcantilevers for off-resonance tapping mode atomic force microscopy},
author = {N. F. S. de Bem and M. G. Ruppert and Y. K. Yong and A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2021/01/C20c.pdf},
doi = {10.1109/MARSS49294.2020.9307881},
year = {2020},
date = {2020-11-30},
urldate = {2020-11-30},
booktitle = {International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS)},
pages = {1-6},
abstract = {Integrated on-chip actuation and sensing in microcantilevers for atomic force microscopy (AFM) allows faster scanning speeds, cleaner frequency responses and smaller cantilevers. However, a single integrated sensor suffers from crosscoupling between displacements originating from tip-sample forces and direct actuation. This paper addresses this issue by presenting a novel microcantilever with on-chip actuation and integrated dual sensing for AFM with application to offresonance tapping modes in AFM. The proposed system is able to measure tip force and deflection simultaneously. A mathematical model is developed for a rectangular cantilever to describe the system and is validated with finite element analysis.},
note = {This work was supported by the Australian Research Council Discovery Project DP170101813},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Integrated on-chip actuation and sensing in microcantilevers for atomic force microscopy (AFM) allows faster scanning speeds, cleaner frequency responses and smaller cantilevers. However, a single integrated sensor suffers from crosscoupling between displacements originating from tip-sample forces and direct actuation. This paper addresses this issue by presenting a novel microcantilever with on-chip actuation and integrated dual sensing for AFM with application to offresonance tapping modes in AFM. The proposed system is able to measure tip force and deflection simultaneously. A mathematical model is developed for a rectangular cantilever to describe the system and is validated with finite element analysis. |
| 153. | 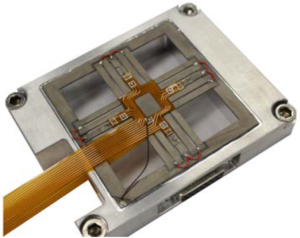 | M. Omidbeike; Y. K. Yong; A. J. Fleming Sensing and Decentralized Control of a Five-Axis Monolithic Nanopositioning Stage Proceedings Article In: IFAC World Congress, pp. 9087-9092, 2020, ISSN: 9087-9092. @inproceedings{C20a,
title = {Sensing and Decentralized Control of a Five-Axis Monolithic Nanopositioning Stage},
author = {M. Omidbeike and Y. K. Yong and A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2022/03/C20a.pdf},
doi = {10.1016/j.ifacol.2020.12.2141},
issn = {9087-9092},
year = {2020},
date = {2020-07-11},
urldate = {2020-07-11},
booktitle = {IFAC World Congress},
volume = {53},
number = {2},
pages = {9087-9092},
abstract = {This article describes the design and calibration of a five degree-of-freedom linearand angular displacement sensor utilizing piezoresistive strain gages. A simple decentralized controller is then implemented to follow linear and angular reference signals. The foremost difficulty with piezoresistive sensors is their high-temperature sensitivity. In addition, they are sensitive to motion in multiple degrees of freedom, which must be decoupled before use as a displacement sensor. A new sensing design is proposed which provides decoupled measurements of linear and angular displacements in multi-axis monolithic nanopositioning stages. The proposed method employs system identification and feedforward techniques to calibrate each axis and minimize cross-coupling. },
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
This article describes the design and calibration of a five degree-of-freedom linearand angular displacement sensor utilizing piezoresistive strain gages. A simple decentralized controller is then implemented to follow linear and angular reference signals. The foremost difficulty with piezoresistive sensors is their high-temperature sensitivity. In addition, they are sensitive to motion in multiple degrees of freedom, which must be decoupled before use as a displacement sensor. A new sensing design is proposed which provides decoupled measurements of linear and angular displacements in multi-axis monolithic nanopositioning stages. The proposed method employs system identification and feedforward techniques to calibrate each axis and minimize cross-coupling. |
| 152. | 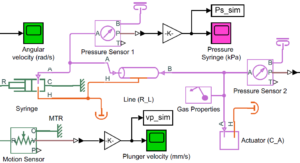 | M. S. Xavier; A. J. Fleming; Y. K. Yong Modelling and Simulation of Pneumatic Sources for Soft Robotic Applications Proceedings Article In: IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Boston, MA, 2020. @inproceedings{C20b,
title = {Modelling and Simulation of Pneumatic Sources for Soft Robotic Applications},
author = {M. S. Xavier and A. J. Fleming and Y. K. Yong},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2020/09/AIM2020_Published.pdf},
doi = {10.1109/aim43001.2020.9158802},
year = {2020},
date = {2020-07-01},
booktitle = {IEEE/ASME International Conference on Advanced Intelligent Mechatronics},
address = {Boston, MA},
abstract = {The mathematical models for two widely used pneumatic systems in the soft robotics community are presented: syringe pumps and compressed air systems. These models enable prediction and optimisation of performance of soft actuators under pressurisation, allowing the user to select pneumatic components for a desired behaviour. Analytical models are confirmed with simulations developed using SimScape Fluids and SimScape Electrical within Simulink/MATLAB. By using a polytropic law, the models show agreement with the simulations with less than 10% discrepancy for the typical pressures used with soft actuators. Syringe pumps are shown to be much slower compared to the compressed air systems. In the latter, the addition of an air receiver allows very short actuation time.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
The mathematical models for two widely used pneumatic systems in the soft robotics community are presented: syringe pumps and compressed air systems. These models enable prediction and optimisation of performance of soft actuators under pressurisation, allowing the user to select pneumatic components for a desired behaviour. Analytical models are confirmed with simulations developed using SimScape Fluids and SimScape Electrical within Simulink/MATLAB. By using a polytropic law, the models show agreement with the simulations with less than 10% discrepancy for the typical pressures used with soft actuators. Syringe pumps are shown to be much slower compared to the compressed air systems. In the latter, the addition of an air receiver allows very short actuation time. |
2019
|
| 151. | 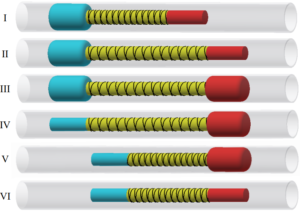 | M. S. Xavier; A. J. Fleming; Y. K. Yong Image-Guided Locomotion of a Pneumatic-Driven Peristaltic Soft Robot Proceedings Article In: IEEE International Conference on Robotics and Biomimetics, Dali, Yunnan, China, 2019, ISBN: 1-4244-0570-X. @inproceedings{C19h,
title = {Image-Guided Locomotion of a Pneumatic-Driven Peristaltic Soft Robot},
author = {M. S. Xavier and A. J. Fleming and Y. K. Yong},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2020/09/C19h.pdf},
doi = {10.1109/ROBIO49542.2019.8961406},
isbn = {1-4244-0570-X},
year = {2019},
date = {2019-12-06},
booktitle = {IEEE International Conference on Robotics and Biomimetics},
address = {Dali, Yunnan, China},
abstract = {In this work, a pneumatic-driven peristaltic soft robot with pressure feedback control and image-guided tracking is developed. Locomotion is achieved in tube-like environments by mimicking the peristaltic motion of earthworms. The soft actuators are made of silicone rubber with 3D molding and fiber reinforcements. Pressure control is performed using custom made syringe pumps and on/off controllers in Arduino. Realtime visual tracking is accomplished in OpenCV with a colorbased approach. The soft robot has a stroke of 30-35mm for each cycle of actuation. This pneumatic soft robot shows great potential for application in minimally invasive surgery due to its compliance and biocompatibility.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
In this work, a pneumatic-driven peristaltic soft robot with pressure feedback control and image-guided tracking is developed. Locomotion is achieved in tube-like environments by mimicking the peristaltic motion of earthworms. The soft actuators are made of silicone rubber with 3D molding and fiber reinforcements. Pressure control is performed using custom made syringe pumps and on/off controllers in Arduino. Realtime visual tracking is accomplished in OpenCV with a colorbased approach. The soft robot has a stroke of 30-35mm for each cycle of actuation. This pneumatic soft robot shows great potential for application in minimally invasive surgery due to its compliance and biocompatibility. |
| 150. | 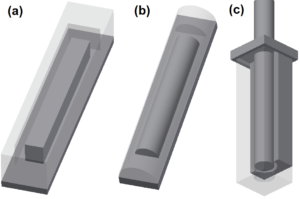 | M. S. Xavier; A. J. Fleming; Y. K. Yong Experimental Characterisation of Hydraulic Fiber-Reinforced Soft Actuators for Worm-Like Robots Proceedings Article In: International Conference on Control, Mechatronics and Automation, Delft, Netherlands, 2019, ISBN: 978-1-7281-3787-2. @inproceedings{C19g,
title = {Experimental Characterisation of Hydraulic Fiber-Reinforced Soft Actuators for Worm-Like Robots},
author = {M. S. Xavier and A. J. Fleming and Y. K. Yong},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2020/05/C19g-reduced.pdf},
doi = {10.1109/ICCMA46720.2019.8988691},
isbn = {978-1-7281-3787-2},
year = {2019},
date = {2019-11-06},
booktitle = {International Conference on Control, Mechatronics and Automation},
address = {Delft, Netherlands},
abstract = {This article describes the design and fabrication of fiber-reinforced soft actuators for a snake-like robot designed to operate inside constrained tubes. The actuators include bending, extension and torsion. These actuators were experimentally characterised using water as the driving fluid with the aid of a water pressure sensor connected to Arduino and video recordings. It is shown that fiber wrapping, geometry of cross-section and elastomer selection are the main parameters affecting the levels of extension, bending and torsion of these actuators. Then, multi-material soft actuators are developed and used to present a soft robot capable of crawling a pipe, a mechanism that could be explored in steerable catheters,endoscopes and pipe inspection devices.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
This article describes the design and fabrication of fiber-reinforced soft actuators for a snake-like robot designed to operate inside constrained tubes. The actuators include bending, extension and torsion. These actuators were experimentally characterised using water as the driving fluid with the aid of a water pressure sensor connected to Arduino and video recordings. It is shown that fiber wrapping, geometry of cross-section and elastomer selection are the main parameters affecting the levels of extension, bending and torsion of these actuators. Then, multi-material soft actuators are developed and used to present a soft robot capable of crawling a pipe, a mechanism that could be explored in steerable catheters,endoscopes and pipe inspection devices. |
| 149. | 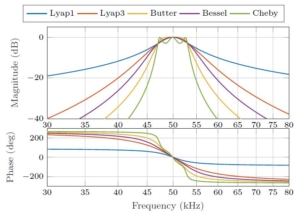 | M. R. P. Ragazzon; S. Messineo; J. T. Gravdahl; D. M. Harcombe; M. G. Ruppert Generalized Lyapunov Demodulator for Amplitude and Phase Estimation by the Internal Model Principle Proceedings Article In: 8th IFAC Symposium on Mechatronic Systems, 2019, (accepted for publication). @inproceedings{Ragazzon2019,
title = {Generalized Lyapunov Demodulator for Amplitude and Phase Estimation by the Internal Model Principle},
author = {M. R. P. Ragazzon and S. Messineo and J. T. Gravdahl and D. M. Harcombe and M. G. Ruppert},
year = {2019},
date = {2019-09-04},
booktitle = {8th IFAC Symposium on Mechatronic Systems},
abstract = {Effective demodulation of amplitude and phase is a requirement in a wide array of applications. Recent efforts have increased the demodulation performance, in particular, the Lyapunov demodulator allows bandwidths up to the carrier frequency of the signal. However, being inherently restricted to a single order filtering of the input signal, signal components outside its passband are not sufficiently attenuated for all applications, such as in multifrequency atomic force microscopy. In this article, the structure of the Lyapunov demodulator is transformed to an equivalent form, taking advantage of the internal model representation of the sinusoid to be tracked. A generalization of this formulation allows the application of standard filtering techniques in order to shape the characteristics of the demodulator, while retaining the perfect tracking condition provided by the internal model. Guidelines for the filter design are provided in order to achieve the desired characteristics, such as filtering order, tracking bandwidth, and transient performance. The resulting generalized Lyapunov demodulator structure is highly flexible, allows for direct employment of any standard filter type, is computationally simple, and easy to implement requiring only a bandpass filter, a single integrator, and two nonlinear transformations. Numerical results demonstrate the effectiveness of the approach, and provide a comparison of the various filters considered.},
note = {accepted for publication},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Effective demodulation of amplitude and phase is a requirement in a wide array of applications. Recent efforts have increased the demodulation performance, in particular, the Lyapunov demodulator allows bandwidths up to the carrier frequency of the signal. However, being inherently restricted to a single order filtering of the input signal, signal components outside its passband are not sufficiently attenuated for all applications, such as in multifrequency atomic force microscopy. In this article, the structure of the Lyapunov demodulator is transformed to an equivalent form, taking advantage of the internal model representation of the sinusoid to be tracked. A generalization of this formulation allows the application of standard filtering techniques in order to shape the characteristics of the demodulator, while retaining the perfect tracking condition provided by the internal model. Guidelines for the filter design are provided in order to achieve the desired characteristics, such as filtering order, tracking bandwidth, and transient performance. The resulting generalized Lyapunov demodulator structure is highly flexible, allows for direct employment of any standard filter type, is computationally simple, and easy to implement requiring only a bandpass filter, a single integrator, and two nonlinear transformations. Numerical results demonstrate the effectiveness of the approach, and provide a comparison of the various filters considered. |
| 148. | 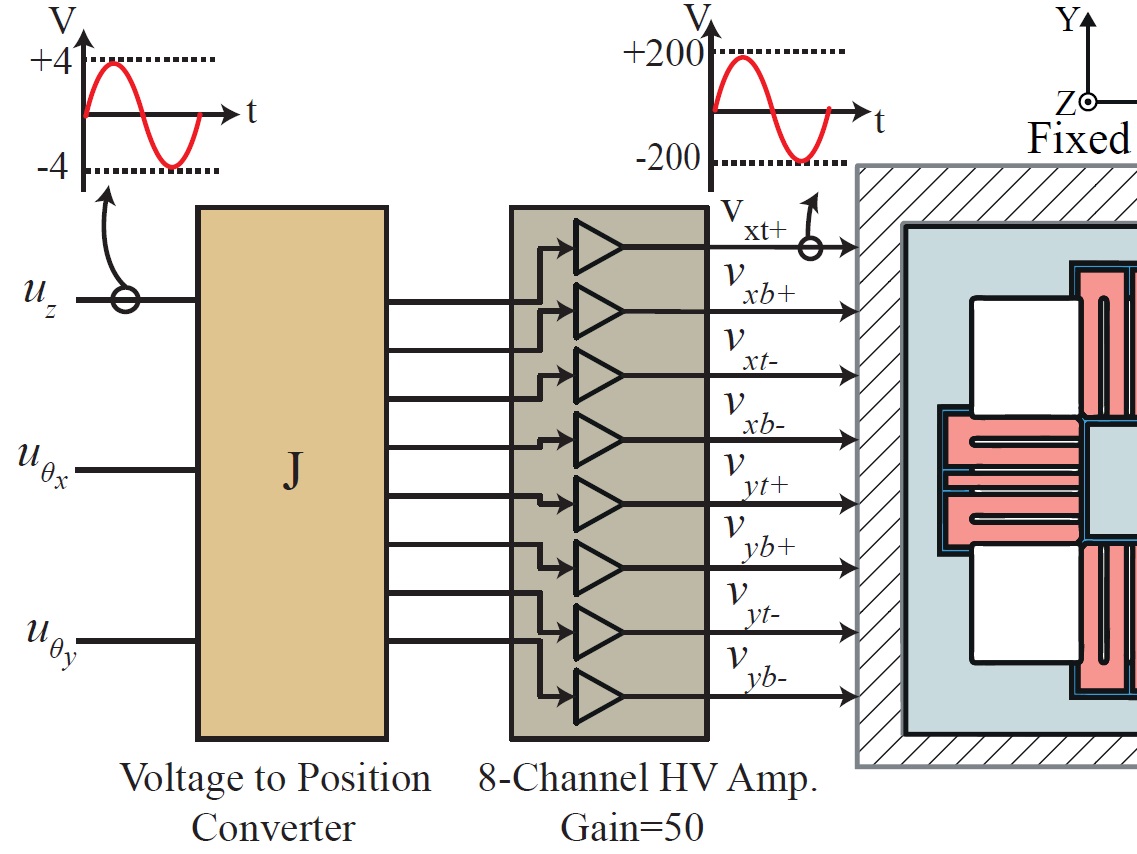 | M. Omidbeike; A. A. Eielsen; Y. K. Yong; A. J. Fleming Multivariable Model-less Feedforward Control of a Monolithic Nanopositioning Stage With FIR Filter Inversion Proceedings Article In: International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS), Helsinki, Finland, 2019, ISSN: 978-1-7281-0948-0. @inproceedings{C19d,
title = {Multivariable Model-less Feedforward Control of a Monolithic Nanopositioning Stage With FIR Filter Inversion},
author = {M. Omidbeike and A. A. Eielsen and Y. K. Yong and A. J. Fleming },
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2021/02/C19d.pdf},
doi = {10.1109/MARSS.2019.8860974},
issn = {978-1-7281-0948-0},
year = {2019},
date = {2019-07-02},
booktitle = {International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS)},
address = {Helsinki, Finland},
abstract = {A model-less approach for inversion of the dynamics of multivariable systems using FIR filters is described. Inversion-based feedforward techniques have been widely used in the literature to achieve high-performance output tracking. The foremost difficulties associated with plant inversions are model uncertainties and non-minimum phase zeros. Various model-based methods have been proposed to exclude nonminimum phase zeros when inverting both single-input and single-output (SISO), and multiple-input and multiple-output (MIMO) systems. However, these methods increase the model uncertainty as they are no longer exact. To overcome these difficulties a model-less approach using FIR filters is presented. The results when applying the feedforward FIR filter to a multivariable nanopositioning system is presented, and they demonstrate the effectiveness of the feedforward technique in reducing the cross-coupling and achieving significantly improved output tracking.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
A model-less approach for inversion of the dynamics of multivariable systems using FIR filters is described. Inversion-based feedforward techniques have been widely used in the literature to achieve high-performance output tracking. The foremost difficulties associated with plant inversions are model uncertainties and non-minimum phase zeros. Various model-based methods have been proposed to exclude nonminimum phase zeros when inverting both single-input and single-output (SISO), and multiple-input and multiple-output (MIMO) systems. However, these methods increase the model uncertainty as they are no longer exact. To overcome these difficulties a model-less approach using FIR filters is presented. The results when applying the feedforward FIR filter to a multivariable nanopositioning system is presented, and they demonstrate the effectiveness of the feedforward technique in reducing the cross-coupling and achieving significantly improved output tracking. |
| 147. | 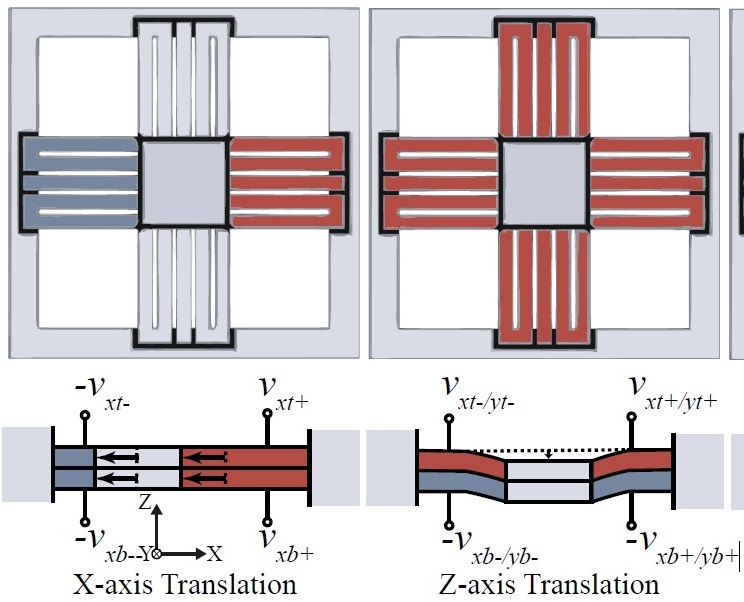 | M. Omidbeike; Y. K. Yong; S. I. Moore; A. J. Fleming
A Five-Axis Monolithic Nanopositioning Stage Constructed from a Bimorph Piezoelectric Sheet Proceedings Article In: International Conference on Manipulation, Automation and Robotics at Small Scales , Helsinki, Finland, 2019, ISSN: 978-1-7281-0948-0. @inproceedings{omidbeike2019axis},
title = {A Five-Axis Monolithic Nanopositioning Stage Constructed from a Bimorph Piezoelectric Sheet},
author = {M. Omidbeike and Y. K. Yong and S. I. Moore and A. J. Fleming
},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2021/02/C19a.pdf},
doi = {10.1109/MARSS.2019.8860940},
issn = {978-1-7281-0948-0},
year = {2019},
date = {2019-07-02},
urldate = {2019-07-02},
booktitle = {International Conference on Manipulation, Automation and Robotics at Small Scales },
journal = {Int. Conference on Manipulation, Automation and Robotics at Small Scales (MARSS)},
address = {Helsinki, Finland},
abstract = {The paper describes design, modeling and control of a five-axis monolithic nanopositioning stage constructed from a bimorph piezoelectric sheet. In this design, actuators are created by removing parts of the sheet using ultrasonic machining. The constructed nanopositioner is ultra-compact with a thickness of 1 mm. It has a X and Y travel range of 15.5 µm and 13.2 µm respectively; a Z travel range of 26 µm; and a rotational motion about the X-and Y-axis of 600 µrad and 884 µrad respectively. The first resonance frequency occurs at 883 Hz in the Z-axis, and the second and third resonance frequency appears at 1850 Hz, rotating about the X-and Y-axis. A decentralized control strategy is implemented to track Z, θx and θy motions. The controller provides good tracking and significantly reduces cross-coupling motions among the three degrees-of-freedom.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
The paper describes design, modeling and control of a five-axis monolithic nanopositioning stage constructed from a bimorph piezoelectric sheet. In this design, actuators are created by removing parts of the sheet using ultrasonic machining. The constructed nanopositioner is ultra-compact with a thickness of 1 mm. It has a X and Y travel range of 15.5 µm and 13.2 µm respectively; a Z travel range of 26 µm; and a rotational motion about the X-and Y-axis of 600 µrad and 884 µrad respectively. The first resonance frequency occurs at 883 Hz in the Z-axis, and the second and third resonance frequency appears at 1850 Hz, rotating about the X-and Y-axis. A decentralized control strategy is implemented to track Z, θx and θy motions. The controller provides good tracking and significantly reduces cross-coupling motions among the three degrees-of-freedom. |
| 146. | 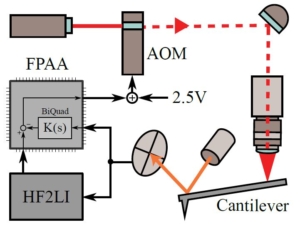 | M. G. Ruppert; B. S. Routley; A. J. Fleming; Y. K. Yong; G. E. Fantner Model-based Q Factor Control for Photothermally Excited Microcantilevers Proceedings Article In: Int. Conference on Manipulation, Automation and Robotics at Small Scales (MARSS), Helsinki, Finland, 2019, ISSN: 978-1-7281-0948-0, (This work was supported by the Australian Research Council Discovery Project DP170101813). @inproceedings{Ruppert2019,
title = {Model-based Q Factor Control for Photothermally Excited Microcantilevers},
author = {M. G. Ruppert and B. S. Routley and A. J. Fleming and Y. K. Yong and G. E. Fantner},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2021/02/C19b.pdf},
doi = {10.1109/MARSS.2019.8860969},
issn = {978-1-7281-0948-0},
year = {2019},
date = {2019-07-01},
urldate = {2019-07-01},
booktitle = {Int. Conference on Manipulation, Automation and Robotics at Small Scales (MARSS)},
address = {Helsinki, Finland},
abstract = {Photothermal excitation of the cantilever for dynamic atomic force microscopy (AFM) modes is an attractive actuation method as it provides clean cantilever actuation leading to well-defined frequency responses. Unlike conventional piezo-acoustic excitation of the cantilever, it allows for model-based quality (Q) factor control in order to increase the cantilever tracking bandwidth for tapping-mode AFM or to reduce resonant ringing for high-speed photothermal offresonance tapping (PORT) in ambient conditions. In this work, we present system identification, controller design and experimental results on controlling the Q factor of a photothermally driven cantilever. The work is expected to lay the groundwork for future implementations for high-speed PORT imaging in ambient conditions.},
note = {This work was supported by the Australian Research Council Discovery Project DP170101813},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Photothermal excitation of the cantilever for dynamic atomic force microscopy (AFM) modes is an attractive actuation method as it provides clean cantilever actuation leading to well-defined frequency responses. Unlike conventional piezo-acoustic excitation of the cantilever, it allows for model-based quality (Q) factor control in order to increase the cantilever tracking bandwidth for tapping-mode AFM or to reduce resonant ringing for high-speed photothermal offresonance tapping (PORT) in ambient conditions. In this work, we present system identification, controller design and experimental results on controlling the Q factor of a photothermally driven cantilever. The work is expected to lay the groundwork for future implementations for high-speed PORT imaging in ambient conditions. |
| 145. | 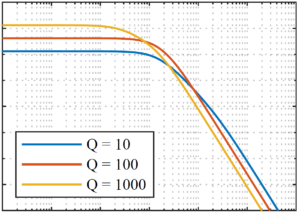 | D. M. Harcombe; M. G. Ruppert; A. J. Fleming Modeling and Noise Analysis of a Microcantilever-based Mass Sensor Proceedings Article In: Int. Conference on Manipulation, Automation and Robotics at Small Scales (MARSS), Helsinki, Finland, 2019, ISSN: 978-1-7281-0948-0. @inproceedings{Harcombe2019,
title = {Modeling and Noise Analysis of a Microcantilever-based Mass Sensor},
author = {D. M. Harcombe and M. G. Ruppert and A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2021/02/C19c.pdf},
doi = {10.1109/MARSS.2019.8860982},
issn = {978-1-7281-0948-0},
year = {2019},
date = {2019-07-01},
booktitle = {Int. Conference on Manipulation, Automation and Robotics at Small Scales (MARSS)},
address = {Helsinki, Finland},
abstract = {Nanomechanical devices have the potential for practical applications as mass sensors. In microcantilever based sensing, resonance frequency shifts are tracked by a
phase-locked loop (PLL) in-order to monitor mass adsorption. A major challenge in minimizing the mass detection limit comes from the noise present in the system due to thermal, sensor and oscillator noise. There is numerical difficulty in simulating PLLs, as both low frequency phase estimates and high frequency mixing products need to be captured resulting in a stiff problem. By using linear system-theoretic modeling an in-depth analysis of the system is able to be conducted overcoming this issue. This provides insight into individual noise source propagation, dominant noise sources and possible ways to reduce their effects. The developed model is verified in simulation against the non-linear PLL, with each achieving low picogram sensitivity for a 100 Hz loop bandwidth and realistically modeled noise sources.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Nanomechanical devices have the potential for practical applications as mass sensors. In microcantilever based sensing, resonance frequency shifts are tracked by a
phase-locked loop (PLL) in-order to monitor mass adsorption. A major challenge in minimizing the mass detection limit comes from the noise present in the system due to thermal, sensor and oscillator noise. There is numerical difficulty in simulating PLLs, as both low frequency phase estimates and high frequency mixing products need to be captured resulting in a stiff problem. By using linear system-theoretic modeling an in-depth analysis of the system is able to be conducted overcoming this issue. This provides insight into individual noise source propagation, dominant noise sources and possible ways to reduce their effects. The developed model is verified in simulation against the non-linear PLL, with each achieving low picogram sensitivity for a 100 Hz loop bandwidth and realistically modeled noise sources. |
2018
|
| 144. | 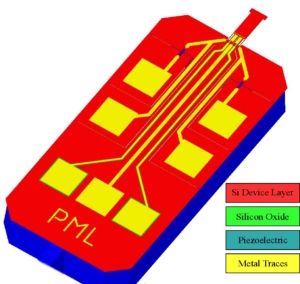 | M. G. Ruppert; Y. K. Yong Design of Hybrid Piezoelectric/Piezoresistive Cantilevers for Dynamic-mode Atomic Force Microscopy Proceedings Article In: IEEE/ASME Advanced Intelligent Mechatronics (AIM), Auckland, New Zealand, 2018, (This work was supported by the Australian Research Council Discovery Project DP170101813). @inproceedings{Ruppert2018b,
title = {Design of Hybrid Piezoelectric/Piezoresistive Cantilevers for Dynamic-mode Atomic Force Microscopy},
author = {M. G. Ruppert and Y. K. Yong},
year = {2018},
date = {2018-07-09},
urldate = {2018-07-09},
booktitle = {IEEE/ASME Advanced Intelligent Mechatronics (AIM)},
address = {Auckland, New Zealand},
abstract = {Atomic force microscope cantilevers with integrated actuation and sensing on the chip level provide several distinct advantages over conventional cantilever instrumentation. These include clean frequency responses, the possibility of down-scaling and parallelization to cantilever arrays as well as the absence of optical interferences. However, the two major difficulties with integrated transduction methods are a complicated fabrication process, often involving a number of fabrication
steps, and a high amount of feedthrough from actuation to sensing electrodes. This work proposes two hybrid cantilever designs with piezoelectric actuators and piezoresistive sensors to reduce the actuator to sensor feedthrough. The designs can be realized using a commercial microelectromechanical systems fabrication process and only require a simple five-mask patterning and etching process. Finite element analysis results are presented to obtain modal responses, actuator gain and sensor sensitivities of the cantilever designs.},
note = {This work was supported by the Australian Research Council Discovery Project DP170101813},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Atomic force microscope cantilevers with integrated actuation and sensing on the chip level provide several distinct advantages over conventional cantilever instrumentation. These include clean frequency responses, the possibility of down-scaling and parallelization to cantilever arrays as well as the absence of optical interferences. However, the two major difficulties with integrated transduction methods are a complicated fabrication process, often involving a number of fabrication
steps, and a high amount of feedthrough from actuation to sensing electrodes. This work proposes two hybrid cantilever designs with piezoelectric actuators and piezoresistive sensors to reduce the actuator to sensor feedthrough. The designs can be realized using a commercial microelectromechanical systems fabrication process and only require a simple five-mask patterning and etching process. Finite element analysis results are presented to obtain modal responses, actuator gain and sensor sensitivities of the cantilever designs. |
| 143. |  | S. I. Moore; M. G. Ruppert; Y. K. Yong Arbitrary placement of AFM cantilever higher eigenmodes using structural optimization Proceedings Article In: International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS), 2018, (This work was supported by the Australian Research Council Discovery Project DP170101813). @inproceedings{Moore2018,
title = {Arbitrary placement of AFM cantilever higher eigenmodes using structural optimization},
author = {S. I. Moore and M. G. Ruppert and Y. K. Yong},
year = {2018},
date = {2018-07-04},
urldate = {2018-07-04},
booktitle = {International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS)},
journal = {International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS)},
abstract = {This article presents a novel cantilever design approach to place higher mode frequencies within a specific frequency band to alleviate instrumentation and Q control feasibility. This work is motivated by the emerging field of multifrequency atomic force microscopy (AFM) which involves the excitation and/or detection of several cantilever modes at once. Unlike other operating modes, multifrequency AFM allows the tracking of the sample topography on the fundamental mode while simultaneously acquiring complimentary nanomechanical information on a higher mode. However, higher modes of conventional rectangular tapping-mode cantilevers are usually in the MHz regime and therefore impose severe restrictions on the direct controllability of these modes. To overcome this limitation, an optimization technique is employed which is capable of placing the first five modes within a 200 kHz bandwidth.},
note = {This work was supported by the Australian Research Council Discovery Project DP170101813},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
This article presents a novel cantilever design approach to place higher mode frequencies within a specific frequency band to alleviate instrumentation and Q control feasibility. This work is motivated by the emerging field of multifrequency atomic force microscopy (AFM) which involves the excitation and/or detection of several cantilever modes at once. Unlike other operating modes, multifrequency AFM allows the tracking of the sample topography on the fundamental mode while simultaneously acquiring complimentary nanomechanical information on a higher mode. However, higher modes of conventional rectangular tapping-mode cantilevers are usually in the MHz regime and therefore impose severe restrictions on the direct controllability of these modes. To overcome this limitation, an optimization technique is employed which is capable of placing the first five modes within a 200 kHz bandwidth. |
| 142. | 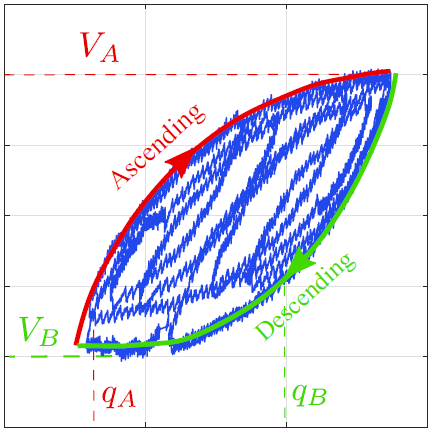 | S. Z. Mansour; R. J. Seethaler; A. J. Fleming A Simple Asymmetric Hysteresis Model for Displacement-Force Control of Piezoelectric Actuators Proceedings Article In: IEEE International Conference on Advanced Intelligent Mechatronics, Auckland, New Zealand, 2018. @inproceedings{C18f,
title = {A Simple Asymmetric Hysteresis Model for Displacement-Force Control of Piezoelectric Actuators},
author = {S. Z. Mansour and R. J. Seethaler and A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2021/02/C18f-1.pdf},
doi = {10.1109/AIM.2018.8452221},
year = {2018},
date = {2018-07-04},
booktitle = {IEEE International Conference on Advanced Intelligent Mechatronics},
address = {Auckland, New Zealand},
abstract = {This article presents a simple hysteresis model for piezoelectric actuators that can be used for simultaneous displacement-force control applications. The presented model maps the hysteresis voltage of an actuator to the charge passing through it. It can model asymmetric hysteresis loops and does not require to be inverted for real-time implementations. The presented model consists of two exponential functions which are described by only four parameters that are identified from a single identification experiment. Another advantage of the presented model over the existing models is that, it requires measurements of current rather than charge. A simultaneously varying displacement-force experiment is created to frame the model. An average absolute error value of 8% for the hysteresis voltage-charge fit is calculated. Consequent displacement and force fits have average absolute error value of 2.5%, which are similar to the best reported in displacement-force control literature.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
This article presents a simple hysteresis model for piezoelectric actuators that can be used for simultaneous displacement-force control applications. The presented model maps the hysteresis voltage of an actuator to the charge passing through it. It can model asymmetric hysteresis loops and does not require to be inverted for real-time implementations. The presented model consists of two exponential functions which are described by only four parameters that are identified from a single identification experiment. Another advantage of the presented model over the existing models is that, it requires measurements of current rather than charge. A simultaneously varying displacement-force experiment is created to frame the model. An average absolute error value of 8% for the hysteresis voltage-charge fit is calculated. Consequent displacement and force fits have average absolute error value of 2.5%, which are similar to the best reported in displacement-force control literature. |
| 141. | 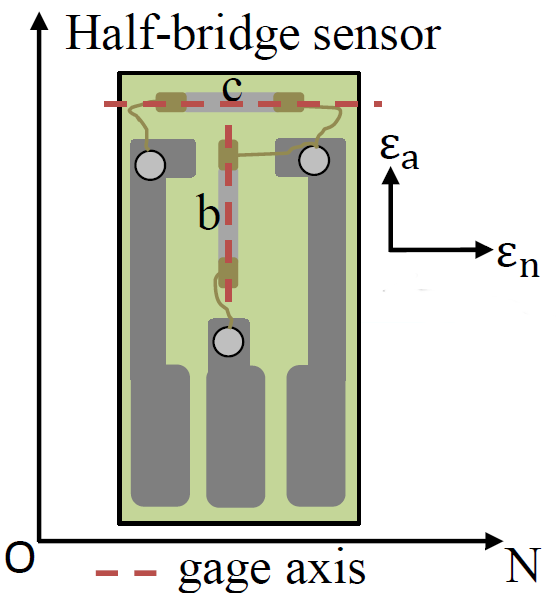 | M. Omidbeike; B. S. Routley; A. J. Fleming Independent Estimation of Temperature and Strain in Tee-Rosette Piezoresistive Strain Sensor Proceedings Article In: IEEE International Conference on Advanced Intelligent Mechatronics, Auckland, New Zealand, 2018. @inproceedings{C18d,
title = {Independent Estimation of Temperature and Strain in Tee-Rosette Piezoresistive Strain Sensor},
author = {M. Omidbeike and B. S. Routley and A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2021/02/C18d.pdf},
doi = {10.1109/AIM.2018.8452304},
year = {2018},
date = {2018-07-04},
booktitle = {IEEE International Conference on Advanced Intelligent Mechatronics},
address = {Auckland, New Zealand},
abstract = {This article proposes a novel technique for independent measurement of strain and temperature in piezoresistive strain sensors configured in a tee-rosette. The most notable property of piezoresistive sensors is their easy integration into MEMS fabrication processes and nanopositioning systems which makes them highly advantageous for both size and cost. The foremost disadvantage associated with piezoresistive sensors is high temperature sensitivity. The proposed estimator allows independent estimation of strain and temperature, which eliminates drift due to temperature variation. Experimental results are presented for motion sensing of a piezoelectric stack actuator which shows a strain measurement with an accuracy of +/-6% over a temperature range of -15C to 40C.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
This article proposes a novel technique for independent measurement of strain and temperature in piezoresistive strain sensors configured in a tee-rosette. The most notable property of piezoresistive sensors is their easy integration into MEMS fabrication processes and nanopositioning systems which makes them highly advantageous for both size and cost. The foremost disadvantage associated with piezoresistive sensors is high temperature sensitivity. The proposed estimator allows independent estimation of strain and temperature, which eliminates drift due to temperature variation. Experimental results are presented for motion sensing of a piezoelectric stack actuator which shows a strain measurement with an accuracy of +/-6% over a temperature range of -15C to 40C. |
| 140. | 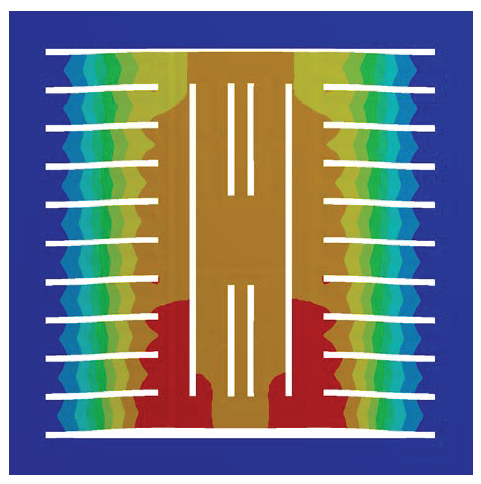 | S. I. Moore; M. Omidbeike; A. J. Fleming; Y. K. Yong A monolithic serial-kinematic nanopositioner with integrated sensors and actuators Proceedings Article In: IEEE International Conference on Advanced Intelligent Mechatronics, Auckland, New Zealand, 2018. @inproceedings{C18e,
title = {A monolithic serial-kinematic nanopositioner with integrated sensors and actuators},
author = {S. I. Moore and M. Omidbeike and A. J. Fleming and Y. K. Yong},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2021/02/C18e.pdf},
doi = {10.1109/AIM.2018.8452225},
year = {2018},
date = {2018-07-04},
booktitle = {IEEE International Conference on Advanced Intelligent Mechatronics},
address = {Auckland, New Zealand},
abstract = {This article describes the design, modeling and simulation of a serial-kinematic nanopositioner machined from a single sheet of piezoelectric material. In this class of nanopositioners, the flexures, sensors and actuators are completely integrated into a single monolithic structure. A non-trivial electrode topology is etched into the sheet to achieve in-plane bending and displacement of the moving platform. Finite element analysis predicts a sensitivity of 18.6 nm/V in the x-axis and 18.1 nm/V in the yaxis with a voltage limit of −250V to 1000 V. The first resonance frequency is 250 Hz in the Z axis. This design enables high-speed, long-range, lateral positioning in space-limited applications.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
This article describes the design, modeling and simulation of a serial-kinematic nanopositioner machined from a single sheet of piezoelectric material. In this class of nanopositioners, the flexures, sensors and actuators are completely integrated into a single monolithic structure. A non-trivial electrode topology is etched into the sheet to achieve in-plane bending and displacement of the moving platform. Finite element analysis predicts a sensitivity of 18.6 nm/V in the x-axis and 18.1 nm/V in the yaxis with a voltage limit of −250V to 1000 V. The first resonance frequency is 250 Hz in the Z axis. This design enables high-speed, long-range, lateral positioning in space-limited applications. |
| 139. | 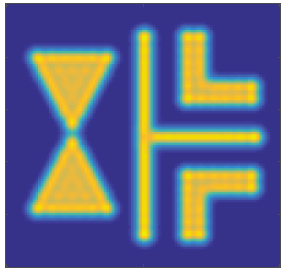 | O. T. Ghalehbeygi; J. O'Connor; B. S. Routley; A. J. Fleming Iterative Deconvolution for Exposure Planning in Scanning Laser Lithography Proceedings Article In: American Control Conference, Milwaukee, WI, 2018. @inproceedings{C18c,
title = {Iterative Deconvolution for Exposure Planning in Scanning Laser Lithography},
author = {O. T. Ghalehbeygi and J. O'Connor and B. S. Routley and A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2021/02/C18c.pdf},
doi = {10.23919/ACC.2018.8431550},
year = {2018},
date = {2018-06-27},
booktitle = {American Control Conference},
address = {Milwaukee, WI},
abstract = {Laser scanning lithography is a maskless method for exposing photoresist during semiconductor manufacturing. In this method, the power of a focused beam is modulated while scanning the photoresist. This article describes an iterative deconvolution method for determining the exposure pattern. This approach is computationally efficient as there is no gradient calculation. Simulations demonstrate the accurate fabrication of a feature with sub-wavelength geometry.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Laser scanning lithography is a maskless method for exposing photoresist during semiconductor manufacturing. In this method, the power of a focused beam is modulated while scanning the photoresist. This article describes an iterative deconvolution method for determining the exposure pattern. This approach is computationally efficient as there is no gradient calculation. Simulations demonstrate the accurate fabrication of a feature with sub-wavelength geometry. |
| 138. | 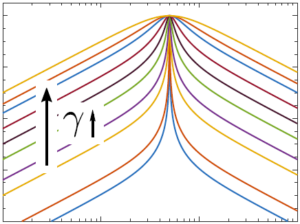 | M. G. Ruppert; D. M. Harcombe; S. I. Moore; A. J. Fleming Direct Design of Closed-loop Demodulators for Amplitude Modulation Atomic Force Microscopy Proceedings Article In: American Control Conference, Milwaukee, WI, 2018. @inproceedings{C18b,
title = {Direct Design of Closed-loop Demodulators for Amplitude Modulation Atomic Force Microscopy},
author = {M. G. Ruppert and D. M. Harcombe and S. I. Moore and A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2021/02/C18b.pdf},
doi = {10.23919/ACC.2018.8430896},
year = {2018},
date = {2018-06-27},
booktitle = {American Control Conference},
address = {Milwaukee, WI},
abstract = {A fundamental component of the z-axis feedback loop in amplitude modulation atomic force microscopy is the demodulator. It dictates both bandwidth and noise in the amplitude and phase estimate of the cantilever deflection signal. In this paper, we derive a linear time-invariant model of a closedloop demodulator with user definable tracking bandwidth and sensitivity to other frequency components. A direct demodulator design method is proposed based on the reformulation of the Lyapunov filter as a modulated-demodulated controller in closed loop with a unity plant. Simulation and experimental results for a higher order Lyapunov filter as well as Butterworth and Chebyshev type demodulators are presented.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
A fundamental component of the z-axis feedback loop in amplitude modulation atomic force microscopy is the demodulator. It dictates both bandwidth and noise in the amplitude and phase estimate of the cantilever deflection signal. In this paper, we derive a linear time-invariant model of a closedloop demodulator with user definable tracking bandwidth and sensitivity to other frequency components. A direct demodulator design method is proposed based on the reformulation of the Lyapunov filter as a modulated-demodulated controller in closed loop with a unity plant. Simulation and experimental results for a higher order Lyapunov filter as well as Butterworth and Chebyshev type demodulators are presented. |
| 137. | 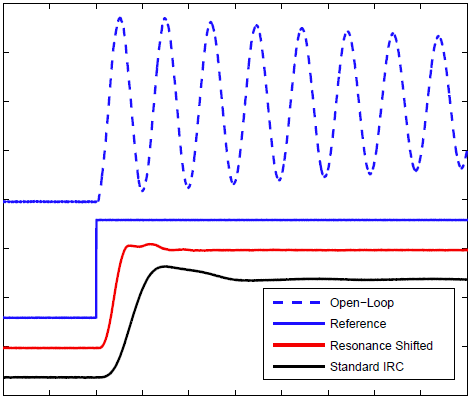 | S. S. Aphale; M. Namavar; A. J. Fleming Resonance-shifting Integral Resonant Control for High-speed Nanopositioning Proceedings Article In: American Control Conference, Milwaukee, WI, 2018. @inproceedings{C18a,
title = {Resonance-shifting Integral Resonant Control for High-speed Nanopositioning},
author = {S. S. Aphale and M. Namavar and A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2021/02/C18a.pdf},
doi = {10.23919/ACC.2018.8430900},
year = {2018},
date = {2018-06-27},
booktitle = {American Control Conference},
address = {Milwaukee, WI},
abstract = {The first resonance mode of mechanical systems is a significant limit to the achievable positioning bandwidth. This resonance is dependent on the physical, material and geometric properties of the system. Significant effort is typically required to increase the resonance frequency by increasing stiffness or reducing mass. In this article, a modified IRC scheme is presented that effectively shifts the first resonance mode to a higher frequency, thereby enabling a substantially higher positioning bandwidth. A 70% increase in positioning bandwidth is demonstrated.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
The first resonance mode of mechanical systems is a significant limit to the achievable positioning bandwidth. This resonance is dependent on the physical, material and geometric properties of the system. Significant effort is typically required to increase the resonance frequency by increasing stiffness or reducing mass. In this article, a modified IRC scheme is presented that effectively shifts the first resonance mode to a higher frequency, thereby enabling a substantially higher positioning bandwidth. A 70% increase in positioning bandwidth is demonstrated. |
2017
|
| 136. | 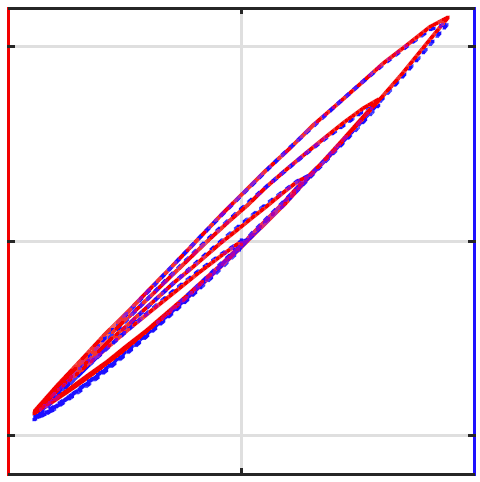 | S. Z. Mansour; R. J. Seethaler; Y. R. Teo; Y. K. Yong; A. J. Fleming Piezoelectric Bimorph Actuator with Integrated Strain Sensing Electrodes Proceedings Article In: IEEE Sensors, Glasgow, Scotland, 2017. @inproceedings{C17f,
title = {Piezoelectric Bimorph Actuator with Integrated Strain Sensing Electrodes},
author = {S. Z. Mansour and R. J. Seethaler and Y. R. Teo and Y. K. Yong and A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2017/08/Bender-paper.pdf},
year = {2017},
date = {2017-11-01},
booktitle = {IEEE Sensors},
address = {Glasgow, Scotland},
abstract = {This article describes a new method for estimating the tip displacement of piezoelectric benders. Two resistive strain gauges are fabricated within the top and bottom electrodes using an acid etching process. These strain gauges are employed in a half bridge electrical configuration to measure the surface resistance change, and estimate the tip displacement. Experimental validation shows a 1.1 % maximum difference between the strain sensor and a laser triangulation sensor.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
This article describes a new method for estimating the tip displacement of piezoelectric benders. Two resistive strain gauges are fabricated within the top and bottom electrodes using an acid etching process. These strain gauges are employed in a half bridge electrical configuration to measure the surface resistance change, and estimate the tip displacement. Experimental validation shows a 1.1 % maximum difference between the strain sensor and a laser triangulation sensor. |
| 135. | 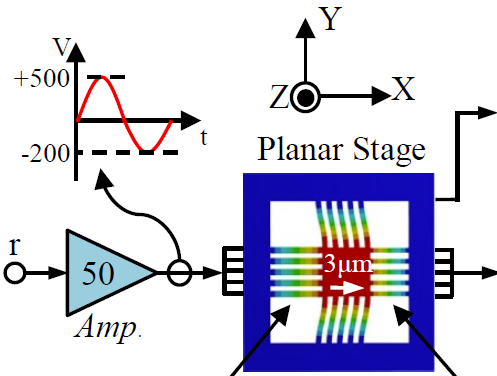 | M. Omidbeike; Y. R. Teo; Y. K. Yong; A. J. Fleming Tracking Control of a Monolithic Piezoelectric Nanopositioning Stage using an Integrated Sensor Proceedings Article In: IFAC World Congress, Toulouse, France, 2017. @inproceedings{C17d,
title = {Tracking Control of a Monolithic Piezoelectric Nanopositioning Stage using an Integrated Sensor},
author = {M. Omidbeike and Y. R. Teo and Y. K. Yong and A. J. Fleming},
year = {2017},
date = {2017-07-09},
booktitle = {IFAC World Congress},
address = {Toulouse, France},
abstract = {This article describes a method for tracking control of monolithic nanopositioning systems using integrated piezoelectric sensors. The monolithic nanopositioner is constructed from a single sheet of piezoelectric material where a set of flexures are used for actuation and guidance, and another set are used for position sensing. This arrangement is shown to be highly sensitive to in-plane motion (in the x- and y-axis) and insensitive to vertical motion, which is ideal for position tracking control.
The foremost difficulty with piezoelectric sensors is their low-frequency high-pass response. In this article, a simple estimator circuit is used to allow the direct application of integral tracking control. Although the system operates in open-loop at DC, dynamic command signals such as scanning trajectories are accurately tracked. Experimental results show significant improvements in linearity and positioning error. },
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
This article describes a method for tracking control of monolithic nanopositioning systems using integrated piezoelectric sensors. The monolithic nanopositioner is constructed from a single sheet of piezoelectric material where a set of flexures are used for actuation and guidance, and another set are used for position sensing. This arrangement is shown to be highly sensitive to in-plane motion (in the x- and y-axis) and insensitive to vertical motion, which is ideal for position tracking control.
The foremost difficulty with piezoelectric sensors is their low-frequency high-pass response. In this article, a simple estimator circuit is used to allow the direct application of integral tracking control. Although the system operates in open-loop at DC, dynamic command signals such as scanning trajectories are accurately tracked. Experimental results show significant improvements in linearity and positioning error. |
| 134. | 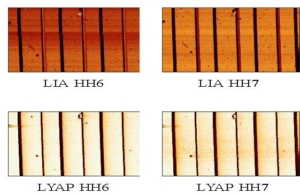 | D. M. Harcombe; M. G. Ruppert; A. J. Fleming Higher-harmonic AFM Imaging with a High-Bandwidth Multifrequency Lyapunov Filter Proceedings Article In: IEEE/ASME Advanced Intelligent Mechatronics (AIM), Munich, Germany, 2017. @inproceedings{C17e,
title = {Higher-harmonic AFM Imaging with a High-Bandwidth Multifrequency Lyapunov Filter},
author = {D. M. Harcombe and M. G. Ruppert and A. J. Fleming},
year = {2017},
date = {2017-07-03},
booktitle = {IEEE/ASME Advanced Intelligent Mechatronics (AIM)},
address = {Munich, Germany},
abstract = {A major difficulty in multifrequency atomic force microscopy (MF-AFM) is the accurate estimation of amplitude and phase at multiple frequencies for both z-axis feedback and material contrast imaging. Typically a lock-in amplifier is chosen as it is both narrowband and simple to implement. However, it inherently suffers drawbacks including a limited bandwidth due to post mixing low-pass filters and the necessity for multiple to be operated in parallel for MF-AFM. This paper proposes a multifrequency demodulator in the form of a modelbased Lyapunov filter implemented on a Field Programmable Gate Array (FPGA). System modelling and simulations are verified by experimental results demonstrating high tracking bandwidth and off-mode rejection at modelled frequencies. Additionally, AFM scans with a five-frequency-based system are presented wherein higher harmonic imaging is performed up to 1 MHz.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
A major difficulty in multifrequency atomic force microscopy (MF-AFM) is the accurate estimation of amplitude and phase at multiple frequencies for both z-axis feedback and material contrast imaging. Typically a lock-in amplifier is chosen as it is both narrowband and simple to implement. However, it inherently suffers drawbacks including a limited bandwidth due to post mixing low-pass filters and the necessity for multiple to be operated in parallel for MF-AFM. This paper proposes a multifrequency demodulator in the form of a modelbased Lyapunov filter implemented on a Field Programmable Gate Array (FPGA). System modelling and simulations are verified by experimental results demonstrating high tracking bandwidth and off-mode rejection at modelled frequencies. Additionally, AFM scans with a five-frequency-based system are presented wherein higher harmonic imaging is performed up to 1 MHz. |
| 133. |  | S. I. Moore; M. G. Ruppert; Y. K. Yong Design and Analysis of Piezoelectric Cantilevers with Enhanced Higher Eigenmodes for Atomic Force Microscopy Proceedings Article In: IEEE/ASME Advanced Intelligent Mechatronics (AIM), Munich, Germany, 2017, (This work was supported by the Australian Research Council Discovery Project DP170101813). @inproceedings{Moore2017b,
title = {Design and Analysis of Piezoelectric Cantilevers with Enhanced Higher Eigenmodes for Atomic Force Microscopy},
author = {S. I. Moore and M. G. Ruppert and Y. K. Yong},
year = {2017},
date = {2017-07-02},
urldate = {2017-07-02},
booktitle = {IEEE/ASME Advanced Intelligent Mechatronics (AIM)},
address = {Munich, Germany},
abstract = {Atomic force microscope (AFM) cantilevers with
integrated actuation and sensing provide several distinct advantages
over conventional cantilever instrumentation such as
clean frequency responses, the possibility of down-scaling and
parallelization to cantilever arrays as well as the absence of optical
interferences. However, for multifrequency AFM techniques
involving higher eigenmodes of the cantilever, optimization
of the transducer location and layout has to be taken into
account. This work proposes multiple integrated piezoelectric
regions on the cantilever which maximize the deflection of the
cantilever and the piezoelectric charge response for a given
higher eigenmode based on the spatial strain distribution. Finite
element analysis is performed to find the optimal transducer
topology and experimental results are presented which highlight
an actuation gain improvement up to 42 dB on the third mode
and sensor sensitivity improvement up to 38 dB on the second
mode.},
note = {This work was supported by the Australian Research Council Discovery Project DP170101813},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Atomic force microscope (AFM) cantilevers with
integrated actuation and sensing provide several distinct advantages
over conventional cantilever instrumentation such as
clean frequency responses, the possibility of down-scaling and
parallelization to cantilever arrays as well as the absence of optical
interferences. However, for multifrequency AFM techniques
involving higher eigenmodes of the cantilever, optimization
of the transducer location and layout has to be taken into
account. This work proposes multiple integrated piezoelectric
regions on the cantilever which maximize the deflection of the
cantilever and the piezoelectric charge response for a given
higher eigenmode based on the spatial strain distribution. Finite
element analysis is performed to find the optimal transducer
topology and experimental results are presented which highlight
an actuation gain improvement up to 42 dB on the third mode
and sensor sensitivity improvement up to 38 dB on the second
mode. |
| 132. | 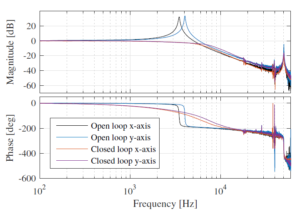 | M. G. Ruppert; M. Maroufi; A. Bazaei; S. O. R. Moheimani Kalman Filter Enabled High-Speed Control of a MEMS Nanopositioner Proceedings Article In: 20th IFAC World Congress, pp. 15554-15560, 2017. @inproceedings{Ruppert2017b,
title = {Kalman Filter Enabled High-Speed Control of a MEMS Nanopositioner},
author = {M. G. Ruppert and M. Maroufi and A. Bazaei and S. O. R. Moheimani},
year = {2017},
date = {2017-07-01},
booktitle = {20th IFAC World Congress},
volume = {50},
number = {1},
pages = {15554-15560},
abstract = {We demonstrate a novel tracking controller formulation based on a linear time-varying
Kalman Filter to regulate amplitude and phase of a reference signal independently. The
method is applicable to sinusoidal references such as spiral, cycloid and Lissajous trajectories
which are commonly used for imaging in high-speed Atomic Force Microscopy (AFM). A
Microelectromechanical Systems (MEMS) based nanopositioner, whose fundamental resonance
frequency is dampened with an additional damping feedback loop, is employed. For a scan range
of 2um, we demonstrate experimental tracking of sinusoids with frequencies as high as 5kHz,
well beyond the open-loop fundamental resonance, with a tracking error of only 4.6nm.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
We demonstrate a novel tracking controller formulation based on a linear time-varying
Kalman Filter to regulate amplitude and phase of a reference signal independently. The
method is applicable to sinusoidal references such as spiral, cycloid and Lissajous trajectories
which are commonly used for imaging in high-speed Atomic Force Microscopy (AFM). A
Microelectromechanical Systems (MEMS) based nanopositioner, whose fundamental resonance
frequency is dampened with an additional damping feedback loop, is employed. For a scan range
of 2um, we demonstrate experimental tracking of sinusoids with frequencies as high as 5kHz,
well beyond the open-loop fundamental resonance, with a tracking error of only 4.6nm. |
| 131. |  | B. S. Routley; F. Miteff; A. J. Fleming Modelling and Control of Nitrogen Partial Pressure for Prophylaxis and Treatment of Air Embolism Proceedings Article In: American Control Conference, Seattle, WA, 2017. @inproceedings{C17a,
title = {Modelling and Control of Nitrogen Partial Pressure for Prophylaxis and Treatment of Air Embolism},
author = {B. S. Routley and F. Miteff and A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2017/03/modelling-control-nitrogen-10.pdf},
year = {2017},
date = {2017-05-01},
booktitle = {American Control Conference},
address = {Seattle, WA},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 130. |  | M. G. Ruppert; D. M. Harcombe; M. R. P. Ragazzon; S. O. R. Moheimani; A. J. Fleming Frequency Domain Analysis of Robust Demodulators for High-Speed Atomic Force Microscopy Proceedings Article In: American Control Conference, Seattle, WA, 2017. @inproceedings{C17b,
title = {Frequency Domain Analysis of Robust Demodulators for High-Speed Atomic Force Microscopy},
author = {M. G. Ruppert and D. M. Harcombe and M. R. P. Ragazzon and S. O. R. Moheimani and A. J. Fleming},
year = {2017},
date = {2017-05-01},
booktitle = {American Control Conference},
address = {Seattle, WA},
abstract = {A fundamental but often overlooked component in the z-axis feedback loop of the atomic force microscope (AFM) operated in dynamic mode is the demodulator. It’s purpose is to obtain a preferably fast and low-noise estimate of amplitude and phase of the cantilever deflection signal in the presence of sensor noise and additional distinct frequency components. In this paper, we implement both traditional and recently developed robust methods on a labVIEW digital processing system and rigorously compare these techniques experimentally in terms of measurement bandwidth, implementation complexity and robustness to noise. We conclude with showing high-speed tapping-mode AFM images in constant height, highlighting the significance of an adequate demodulator bandwidth.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
A fundamental but often overlooked component in the z-axis feedback loop of the atomic force microscope (AFM) operated in dynamic mode is the demodulator. It’s purpose is to obtain a preferably fast and low-noise estimate of amplitude and phase of the cantilever deflection signal in the presence of sensor noise and additional distinct frequency components. In this paper, we implement both traditional and recently developed robust methods on a labVIEW digital processing system and rigorously compare these techniques experimentally in terms of measurement bandwidth, implementation complexity and robustness to noise. We conclude with showing high-speed tapping-mode AFM images in constant height, highlighting the significance of an adequate demodulator bandwidth. |
| 129. |  | M. Maroufi; M. G. Ruppert; A. G. Fowler; S. O. R. Moheimani Design and Control of a Single-chip SOI-MEMS Atomic Force Microscope Proceedings Article In: American Control Conference, 2017. @inproceedings{Maroufi2017,
title = {Design and Control of a Single-chip SOI-MEMS Atomic Force Microscope},
author = {M. Maroufi and M. G. Ruppert and A. G. Fowler and S. O. R. Moheimani},
year = {2017},
date = {2017-05-01},
booktitle = {American Control Conference},
abstract = {This paper presents a novel microelectromechanical
systems (MEMS) implementation of an on-chip atomic
force microscope (AFM), fabricated using a silicon-on-insulator
process. The device features an XY scanner with electrostatic
actuators and electrothermal sensors, as well as an integrated
silicon microcantilever. A single AlN piezoelectric electrode is
used for simultaneous actuation and deflection sensing of the
cantilever via a charge sensing technique. With the device being
operated in closed loop, the probe scanner is successfully used to
obtain 8mmx8mm tapping-mode AFM images of a calibration
grating.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
This paper presents a novel microelectromechanical
systems (MEMS) implementation of an on-chip atomic
force microscope (AFM), fabricated using a silicon-on-insulator
process. The device features an XY scanner with electrostatic
actuators and electrothermal sensors, as well as an integrated
silicon microcantilever. A single AlN piezoelectric electrode is
used for simultaneous actuation and deflection sensing of the
cantilever via a charge sensing technique. With the device being
operated in closed loop, the probe scanner is successfully used to
obtain 8mmx8mm tapping-mode AFM images of a calibration
grating. |
| 128. |  | S. I. Moore; Y. K. Yong; S. O. R. Moheimani Switched Self-Sensing Actuator for a MEMS Nanopositioner Proceedings Article In: International Conference on Mechatronics, Gippsland, Australia, 2017. @inproceedings{Moore2017b,
title = {Switched Self-Sensing Actuator for a MEMS Nanopositioner},
author = {S. I. Moore and Y. K. Yong and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2017/03/sensor-note.pdf},
year = {2017},
date = {2017-02-15},
booktitle = {International Conference on Mechatronics},
address = {Gippsland, Australia},
abstract = {This work outlines the instrumentation and actuation of a MEMS nanopositioner, implementing a switching electronics based self-sensing actuation technique. Self-sensing actuation allows for optimal use of transducer die space in MEMS designs. The switching design accommodates actuation voltages of 50V and is compatible with the silicon-on-insulator microfabrication process. The switching electronics are designed to be directly interfaced to a digital control platform. The actuator is based on the class D amplifier and the sensor is implemented using a modulator to create a displacement-to-digital type sensor that is operated at 1MHz.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
This work outlines the instrumentation and actuation of a MEMS nanopositioner, implementing a switching electronics based self-sensing actuation technique. Self-sensing actuation allows for optimal use of transducer die space in MEMS designs. The switching design accommodates actuation voltages of 50V and is compatible with the silicon-on-insulator microfabrication process. The switching electronics are designed to be directly interfaced to a digital control platform. The actuator is based on the class D amplifier and the sensor is implemented using a modulator to create a displacement-to-digital type sensor that is operated at 1MHz. |
2016
|
| 127. | 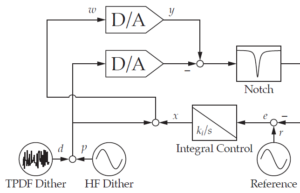 | A. A. Eielsen; A. J. Fleming Improving DAC Resolution in Closed-Loop Control of Precision Mechatronic Systems Using Dithering Proceedings Article In: IEEE Conference on Decision and Control, Las Vegas, NV, 2016. @inproceedings{C16k,
title = {Improving DAC Resolution in Closed-Loop Control of Precision Mechatronic Systems Using Dithering},
author = {A. A. Eielsen and A. J. Fleming},
year = {2016},
date = {2016-12-12},
booktitle = {IEEE Conference on Decision and Control},
address = {Las Vegas, NV},
abstract = {The resolution of precision mechatronic systems is fundamentally limited by the the noise and distortion performance of digital-to-analog converters. The sources of noise and distortion include quantization error, non-linearity, thermal noise, and semiconductor noise. In precision control applications, the primary limitation is harmonic distortion due to quantization and element mismatch. In this article, quantization noise and harmonic distortion are reduced by combinations of small noise dithers and large high-frequency periodic dithers. Theoretical predictions are confirmed experimentally on a closed-loop nanopositioning system. The results show reasonable correspondence to simulation and a significant reduction in noise due to quantization and element mismatch.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
The resolution of precision mechatronic systems is fundamentally limited by the the noise and distortion performance of digital-to-analog converters. The sources of noise and distortion include quantization error, non-linearity, thermal noise, and semiconductor noise. In precision control applications, the primary limitation is harmonic distortion due to quantization and element mismatch. In this article, quantization noise and harmonic distortion are reduced by combinations of small noise dithers and large high-frequency periodic dithers. Theoretical predictions are confirmed experimentally on a closed-loop nanopositioning system. The results show reasonable correspondence to simulation and a significant reduction in noise due to quantization and element mismatch. |
| 126. | 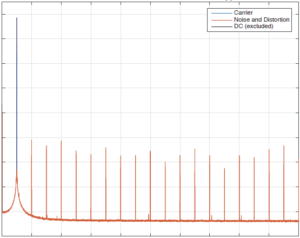 | A. A. Eielsen; A. J. Fleming Experimental Assessment of Dynamic Digital-to-Analog Converter Performance for Applications in Precision Mechatronic Systems Proceedings Article In: Australian Control Conference, Newcastle, Australia, 2016. @inproceedings{C16f,
title = {Experimental Assessment of Dynamic Digital-to-Analog Converter Performance for Applications in Precision Mechatronic Systems},
author = {A. A. Eielsen and A. J. Fleming},
year = {2016},
date = {2016-11-05},
booktitle = {Australian Control Conference},
address = {Newcastle, Australia},
abstract = {An experimental assessment of some state-of-the-art commercially available digital-to-analog converters (DACs) is presented. A DAC is the principal enabling device for implementing modern digital feed-forward and feedback control. For precision mechatronic systems employing the best available instrumentation, the main limitation to resolution is presently the noise and distortion performance of DACs. The paper focuses on measuring the dynamic performance of the DACs, that is, the maximum resolution that can be achieved in practice when using the DACs for trajectory tracking, as well as the time-delay introduced due to DAC latency.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
An experimental assessment of some state-of-the-art commercially available digital-to-analog converters (DACs) is presented. A DAC is the principal enabling device for implementing modern digital feed-forward and feedback control. For precision mechatronic systems employing the best available instrumentation, the main limitation to resolution is presently the noise and distortion performance of DACs. The paper focuses on measuring the dynamic performance of the DACs, that is, the maximum resolution that can be achieved in practice when using the DACs for trajectory tracking, as well as the time-delay introduced due to DAC latency. |
| 125. |  | R. de Rozario; A. J. Fleming; T. Oomen Iterative Control for Periodic Tasks with Robustness Considerations, Applied to a Nanopositioning Stage Proceedings Article In: IFAC Symposium on Mechatronic Systems, Loughborough, UK, 2016. @inproceedings{C16g,
title = {Iterative Control for Periodic Tasks with Robustness Considerations, Applied to a Nanopositioning Stage},
author = {R. de Rozario and A. J. Fleming and T. Oomen},
year = {2016},
date = {2016-09-05},
booktitle = {IFAC Symposium on Mechatronic Systems},
address = {Loughborough, UK},
abstract = {Nanopositioning stages are an example of motion systems that are required to accurately perform a high frequent repetitive scanning motion. The tracking performance can be signi�cantly increased by iteratively updating a feedforward input by using a nonparametric inverse plant model. However, in this paper it is shown that current approaches lack systematic robustness considerations and are su�ering from limited design freedom to enforce satisfying convergence behavior. Therefore, inspired by existing the Iterative Learning Control approach, robustness is added to the existing methods to enable the desired convergence behavior. This results in the Robust Iterative Inversion-based Control method, whose potential for superior convergence is experimentally veri�ed on a Nanopositioning system.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Nanopositioning stages are an example of motion systems that are required to accurately perform a high frequent repetitive scanning motion. The tracking performance can be signi�cantly increased by iteratively updating a feedforward input by using a nonparametric inverse plant model. However, in this paper it is shown that current approaches lack systematic robustness considerations and are su�ering from limited design freedom to enforce satisfying convergence behavior. Therefore, inspired by existing the Iterative Learning Control approach, robustness is added to the existing methods to enable the desired convergence behavior. This results in the Robust Iterative Inversion-based Control method, whose potential for superior convergence is experimentally veri�ed on a Nanopositioning system. |
| 124. | 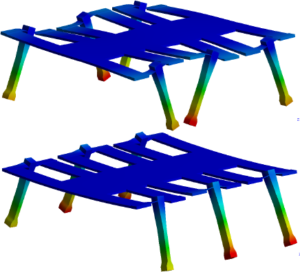 | S. A. Rios; A. J. Fleming; Y. K. Yong Design and Characterization of a Minature Monolithic Piezoelectric Hexapod Robot Proceedings Article In: IEEE Advanced Intelligent Mechatronics, Banff, Canada, 2016. @inproceedings{C16h,
title = {Design and Characterization of a Minature Monolithic Piezoelectric Hexapod Robot},
author = {S. A. Rios and A. J. Fleming and Y. K. Yong},
year = {2016},
date = {2016-07-12},
booktitle = {IEEE Advanced Intelligent Mechatronics},
address = {Banff, Canada},
abstract = {This paper describes the design, construction and resonant performance of a monolithic piezoelectric miniature hexapod robot. The miniature robot operates by driving the piezoelectric elements at the mid point between the first and second resonance modes to produce an ambulatory motion. The monolithic robot was milled out of a single piece of
outwardly poled piezoelectric bimorph using an ultrasonic milling machine. Silver electrodes were evaporated onto the bimorph to isolate the individual piezoelectric elements from
each other. The leg end-effectors of the robot were milled out of aluminium and a previously described lumped mass model was used to design the end-effector for the leg such that the swinging and lifting resonant modes were closely matched. The finished robot attained a swinging and lifting resonance frequency of 300 Hz and 330 Hz with a 5 Hz and 7 Hz spread between legs respectively.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
This paper describes the design, construction and resonant performance of a monolithic piezoelectric miniature hexapod robot. The miniature robot operates by driving the piezoelectric elements at the mid point between the first and second resonance modes to produce an ambulatory motion. The monolithic robot was milled out of a single piece of
outwardly poled piezoelectric bimorph using an ultrasonic milling machine. Silver electrodes were evaporated onto the bimorph to isolate the individual piezoelectric elements from
each other. The leg end-effectors of the robot were milled out of aluminium and a previously described lumped mass model was used to design the end-effector for the leg such that the swinging and lifting resonant modes were closely matched. The finished robot attained a swinging and lifting resonance frequency of 300 Hz and 330 Hz with a 5 Hz and 7 Hz spread between legs respectively. |
| 123. | 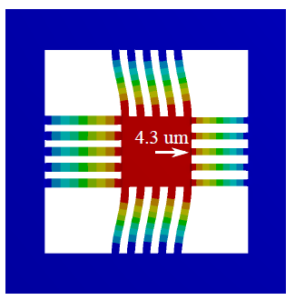 | A. J. Fleming; G. Berriman; Y. K. Yong Design, Modeling, and Characterization of an XY Nanopositioning Stage Constructed from a Single Sheet of Piezoelectric Material Proceedings Article In: IEEE Advanced Intelligent Mechatronics, Banff, Canada, 2016. @inproceedings{C16e,
title = {Design, Modeling, and Characterization of an XY Nanopositioning Stage Constructed from a Single Sheet of Piezoelectric Material},
author = {A. J. Fleming and G. Berriman and Y. K. Yong},
year = {2016},
date = {2016-07-12},
booktitle = {IEEE Advanced Intelligent Mechatronics},
address = {Banff, Canada},
abstract = {This article describes the design, fabrication and testing of a new XY nanopositioning stage constructed from a single sheet of piezoelectric material. The approach involves direct ultrasonic machining of a piezoelectric sheet to create flexural and actuator features. An industrial inkjet printer is then used to create electrode features by printing Nitric Acid directly onto the evaporated metal surface of the piezo sheet. The result is a monolithic piezoelectric structure with individual electrical control over each actuator feature. Experimental results demonstrate a full-scale range of 9um in the X and Y axes, and a first resonance frequency of 230Hz in the Z axes. The completed nanopositioner is the thinnest yet reported with a thickness of only 500um. The new design method will enable a new range of ultra-compact applications in scanning probe microscopy, scanning electron microscopy, and active optics. },
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
This article describes the design, fabrication and testing of a new XY nanopositioning stage constructed from a single sheet of piezoelectric material. The approach involves direct ultrasonic machining of a piezoelectric sheet to create flexural and actuator features. An industrial inkjet printer is then used to create electrode features by printing Nitric Acid directly onto the evaporated metal surface of the piezo sheet. The result is a monolithic piezoelectric structure with individual electrical control over each actuator feature. Experimental results demonstrate a full-scale range of 9um in the X and Y axes, and a first resonance frequency of 230Hz in the Z axes. The completed nanopositioner is the thinnest yet reported with a thickness of only 500um. The new design method will enable a new range of ultra-compact applications in scanning probe microscopy, scanning electron microscopy, and active optics. |
| 122. | 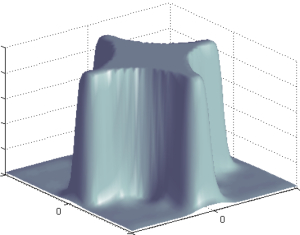 | A. J. Fleming; A. G. Wills; O. T. Ghalehbeygi; B. S. Routley; B. Ninness A Nonlinear Programming Approach to Exposure Optimization in Scanning Laser Lithography Proceedings Article In: American Control Conference, Boston, MA, 2016. @inproceedings{C16d,
title = {A Nonlinear Programming Approach to Exposure Optimization in Scanning Laser Lithography},
author = {A. J. Fleming and A. G. Wills and O. T. Ghalehbeygi and B. S. Routley and B. Ninness},
year = {2016},
date = {2016-07-01},
booktitle = {American Control Conference},
address = {Boston, MA},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 121. | 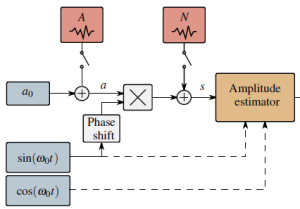 | M. R. P. Ragazzon; J. T. Gravdahl; A. J. Fleming On Amplitude Estimation for High-Speed Atomic Force Microscopy (invited) Proceedings Article In: American Control Conference, Boston, MA, 2016. @inproceedings{C16b,
title = {On Amplitude Estimation for High-Speed Atomic Force Microscopy (invited)},
author = {M. R. P. Ragazzon and J. T. Gravdahl and A. J. Fleming },
year = {2016},
date = {2016-07-01},
booktitle = {American Control Conference},
address = {Boston, MA},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 120. |  | Y. R. Teo; Y. K. Yong; A. J. Fleming A Review of Scanning Methods and Control Implications for Scanning Probe Microscopy (Invited Paper) Proceedings Article In: American Control Conference, Boston, MA, 2016., Boston, MA, 2016. @inproceedings{C16c,
title = {A Review of Scanning Methods and Control Implications for Scanning Probe Microscopy (Invited Paper)},
author = {Y. R. Teo and Y. K. Yong and A. J. Fleming},
year = {2016},
date = {2016-07-01},
booktitle = {American Control Conference, Boston, MA, 2016.},
address = {Boston, MA},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 119. | 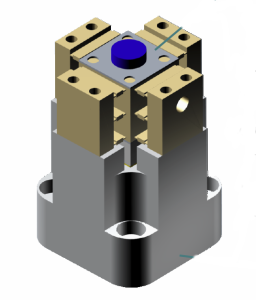 | Y. K. Yong; S. P. Wadikhaye; A. J. Fleming High-Speed Single-Stage and Dual-Stage Mirror Scanners (Invited Paper) Proceedings Article In: International Conference on Manipulation, Automation and Robotics at Small Scales, Paris, France, 2016. @inproceedings{C16j,
title = {High-Speed Single-Stage and Dual-Stage Mirror Scanners (Invited Paper)},
author = {Y. K. Yong and S. P. Wadikhaye and A. J. Fleming},
year = {2016},
date = {2016-07-01},
booktitle = {International Conference on Manipulation, Automation and Robotics at Small Scales},
address = {Paris, France},
abstract = {This article presents a high-speed single-stage and dual-stage mirror scanner for applications in optical systems. Each scanner employs a unique end-constraint method with orthogonal flexures to preload a piezoelectric stack actuator. This end-constraint method also significantly increases the first mechanical resonance frequency. The single-stage scanner has a displacement range of 7.6 �m and a first resonance frequency of 46.8 kHz. The dual-stage design consists of a long-range slow-stage and a short-range fast-stage. An inertial counterbalance technique was implemented on the fast-stage to cancel inertial forces resulting from high-speed motion. The dual-stage scanner has a combined travel range of approximately 10 �m and a first resonance frequency of 130 kHz.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
This article presents a high-speed single-stage and dual-stage mirror scanner for applications in optical systems. Each scanner employs a unique end-constraint method with orthogonal flexures to preload a piezoelectric stack actuator. This end-constraint method also significantly increases the first mechanical resonance frequency. The single-stage scanner has a displacement range of 7.6 �m and a first resonance frequency of 46.8 kHz. The dual-stage design consists of a long-range slow-stage and a short-range fast-stage. An inertial counterbalance technique was implemented on the fast-stage to cancel inertial forces resulting from high-speed motion. The dual-stage scanner has a combined travel range of approximately 10 �m and a first resonance frequency of 130 kHz. |
| 118. | 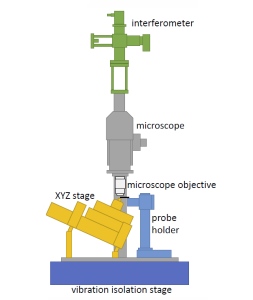 | B. S. Routley; A. J. Fleming High Sensitivity Interferometer for on-Axis Detection of AFM Cantilever Deflection Proceedings Article In: International Conference on Manipulation, Automation and Robotics at Small Scales, Paris, France, 2016. @inproceedings{C16i,
title = {High Sensitivity Interferometer for on-Axis Detection of AFM Cantilever Deflection},
author = {B. S. Routley and A. J. Fleming},
year = {2016},
date = {2016-07-01},
booktitle = {International Conference on Manipulation, Automation and Robotics at Small Scales},
address = {Paris, France},
abstract = {A homodyne path stabilised Michelson based interferometer displacement sensor was developed. This sensor achieved a noise floor of 100 fm/rt(Hz), for frequencies higher than 100 kHz. A prototype AFM that integrated this sensor was developed. Using tapping mode, topography maps of an AFM test grid were produced. },
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
A homodyne path stabilised Michelson based interferometer displacement sensor was developed. This sensor achieved a noise floor of 100 fm/rt(Hz), for frequencies higher than 100 kHz. A prototype AFM that integrated this sensor was developed. Using tapping mode, topography maps of an AFM test grid were produced. |
| 117. | 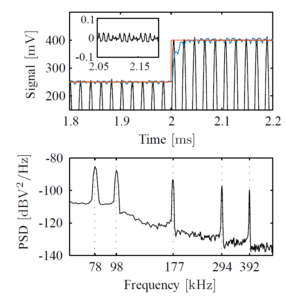 | M. G. Ruppert; D. M. Harcombe; S. O. R. Moheimani State estimation for high-speed multifrequency atomic force microscopy Proceedings Article In: American Control Conference, pp. 2617-2622, Boston, MA, USA, 2016. @inproceedings{Ruppert2016b,
title = {State estimation for high-speed multifrequency atomic force microscopy},
author = {M. G. Ruppert and D. M. Harcombe and S. O. R. Moheimani},
doi = {10.1109/ACC.2016.7525311},
year = {2016},
date = {2016-07-01},
booktitle = {American Control Conference},
pages = {2617-2622},
address = {Boston, MA, USA},
abstract = {A fundamental component in the z-axis feedback loop of an atomic force microscope (AFM) operated in dynamic mode is the lock-in amplifier to obtain amplitude and phase of the high-frequency cantilever deflection signal. While this narrowband demodulation technique is capable of filtering noise far away from the carrier and modulation frequency, its performance is ultimately bounded by the bandwidth of its low-pass filter which is employed to suppress the frequency component at twice the carrier frequency. Moreover, multiple eigenmodes and higher harmonics are used for imaging in modern multifrequency AFMs, which necessitates multiple lock-in amplifiers to recover the respective amplitude and phase information. We propose to estimate amplitude and phase of multiple frequency components with a linear time-varying Kalman filter which allows for an efficient implementation on a Field Programmable Gate Array (FPGA). While experimental results for the single mode case have already proven to increase the imaging bandwidth in tapping-mode AFM, multifrequency simulations promise further improvement in imaging flexibility. },
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
A fundamental component in the z-axis feedback loop of an atomic force microscope (AFM) operated in dynamic mode is the lock-in amplifier to obtain amplitude and phase of the high-frequency cantilever deflection signal. While this narrowband demodulation technique is capable of filtering noise far away from the carrier and modulation frequency, its performance is ultimately bounded by the bandwidth of its low-pass filter which is employed to suppress the frequency component at twice the carrier frequency. Moreover, multiple eigenmodes and higher harmonics are used for imaging in modern multifrequency AFMs, which necessitates multiple lock-in amplifiers to recover the respective amplitude and phase information. We propose to estimate amplitude and phase of multiple frequency components with a linear time-varying Kalman filter which allows for an efficient implementation on a Field Programmable Gate Array (FPGA). While experimental results for the single mode case have already proven to increase the imaging bandwidth in tapping-mode AFM, multifrequency simulations promise further improvement in imaging flexibility. |
2015
|
| 116. |  | A. J. Fleming; B. S. Routley; J. L. Holdsworth A Closed-Loop Phase-Locked Interferometer for Wide Bandwidth Position Sensing Proceedings Article In: IEEE Multi-conference on Systems and Control, Sydney, 2015. @inproceedings{C15a,
title = {A Closed-Loop Phase-Locked Interferometer for Wide Bandwidth Position Sensing},
author = {A. J. Fleming and B. S. Routley and J. L. Holdsworth},
year = {2015},
date = {2015-12-01},
booktitle = {IEEE Multi-conference on Systems and Control},
address = {Sydney},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 115. | 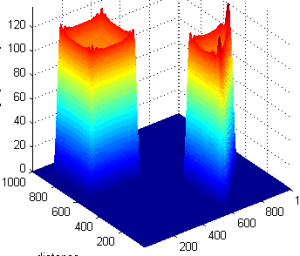 | O. T. Ghalehbeygi; G. Berriman; A. J. Fleming; J. L. Holdsworth Optimization and Simulation of Exposure Pattern for Scanning Laser Lithography Proceedings Article In: IEEE Multiconference on Systems and Control, Sydney, 2015. @inproceedings{C15d,
title = {Optimization and Simulation of Exposure Pattern for Scanning Laser Lithography},
author = {O. T. Ghalehbeygi and G. Berriman and A. J. Fleming and J. L. Holdsworth},
year = {2015},
date = {2015-12-01},
booktitle = {IEEE Multiconference on Systems and Control},
address = {Sydney},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 114. | 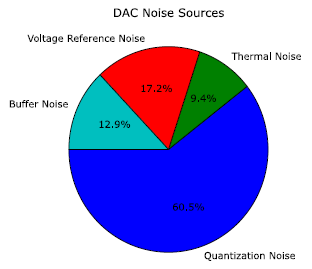 | T. D. Godfrey; A. A. Eielsen; A. J. Fleming Digital to Analog Converter Considerations for Achieving One Part-Per-Million in Precision Mechatronics Systems Proceedings Article In: IEEE Multiconference on Systems and Control, Sydney, 2015. @inproceedings{C15f,
title = {Digital to Analog Converter Considerations for Achieving One Part-Per-Million in Precision Mechatronics Systems},
author = {T. D. Godfrey and A. A. Eielsen and A. J. Fleming},
year = {2015},
date = {2015-12-01},
booktitle = {IEEE Multiconference on Systems and Control},
address = {Sydney},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 113. | 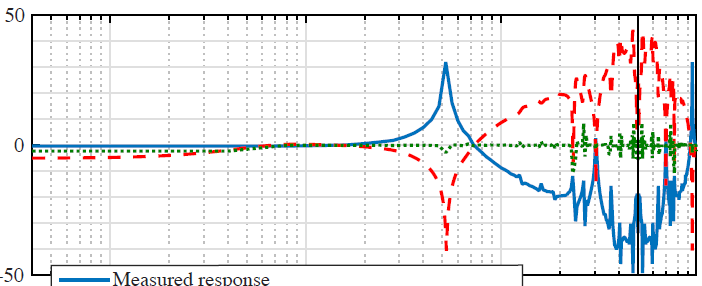 | Y. R. Teo; A. A. Eielsen; A. J. Fleming Model-less FIR Repetitive Control with consideration of uncertainty Proceedings Article In: IEEE Multiconference on Systems and Control, Sydney, 2015. @inproceedings{C15c,
title = {Model-less FIR Repetitive Control with consideration of uncertainty},
author = {Y. R. Teo and A. A. Eielsen and A. J. Fleming},
year = {2015},
date = {2015-12-01},
booktitle = {IEEE Multiconference on Systems and Control},
address = {Sydney},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 112. | 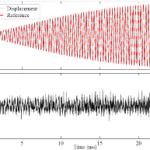 | A. Bazaei; Y. K. Yong; S. O. R. Moheimani Internal Model Control for High-speed Spiral Scan AFM Proceedings Article In: Australian Control Conference, Gold Coast, Australia, 2015. @inproceedings{Bazaei2015,
title = {Internal Model Control for High-speed Spiral Scan AFM},
author = {A. Bazaei and Y. K. Yong and S. O. R. Moheimani },
year = {2015},
date = {2015-11-01},
booktitle = {Australian Control Conference, Gold Coast, Australia},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 111. | 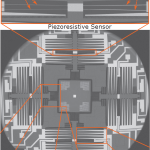 | M. Maroufi; Y. K. Yong; S. O. R. Moheimani Design and Control of a MEMS Nanopositioner with Bulk Piezoresistive Sensors Proceedings Article In: IEEE Multiconference on Systems and Control, Sydney, Australia, 2015. @inproceedings{Maroufi2015,
title = {Design and Control of a MEMS Nanopositioner with Bulk Piezoresistive Sensors},
author = {M. Maroufi and Y. K. Yong and S. O. R. Moheimani },
url = {http://www.eng.newcastle.edu.au/~yy582/Papers/Maroufi2015.pdf},
year = {2015},
date = {2015-09-01},
booktitle = {IEEE Multiconference on Systems and Control, Sydney, Australia},
abstract = {A 2 degree of freedom microelectromechanical system (MEMS) nanopositioner is presented in this paper. The nanopositioner is fabricated using a standard silicon-on-insulator process. The device demonstrates a bidirectional displacement in two orthogonal directions. As the displacement sensing mechanism, bulk piezoresistivity of tilted clamped-guided beams is exploited. The characterization reveals more than 15 μm displacement range and an in-plane bandwidth of above 3.6 kHz in both axes. The piezoresistive sensors provide a bandwidth which is more than ten times larger than the stage's resonant frequency. To evaluate the sensor performance in closed-loop, an integral resonant controller together with an integral tracking controller are implemented where piezoresistive sensor outputs are used as measurement. The controlled nanopositioner is used for imaging in an atomic force microscope.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
A 2 degree of freedom microelectromechanical system (MEMS) nanopositioner is presented in this paper. The nanopositioner is fabricated using a standard silicon-on-insulator process. The device demonstrates a bidirectional displacement in two orthogonal directions. As the displacement sensing mechanism, bulk piezoresistivity of tilted clamped-guided beams is exploited. The characterization reveals more than 15 μm displacement range and an in-plane bandwidth of above 3.6 kHz in both axes. The piezoresistive sensors provide a bandwidth which is more than ten times larger than the stage's resonant frequency. To evaluate the sensor performance in closed-loop, an integral resonant controller together with an integral tracking controller are implemented where piezoresistive sensor outputs are used as measurement. The controlled nanopositioner is used for imaging in an atomic force microscope. |
| 110. | 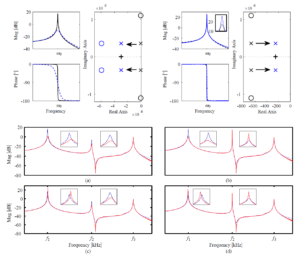 | M. G. Ruppert; S. O. R. Moheimani Multi-Mode Q Control in Multifrequency Atomic Force Microscopy Proceedings Article In: ASME International Design Engineering Technical Conferences & Computers and Information in Engineering Conference, pp. V004T09A009, Boston, Massachusetts, USA, 2015. @inproceedings{Ruppert2015,
title = {Multi-Mode Q Control in Multifrequency Atomic Force Microscopy},
author = {M. G. Ruppert and S. O. R. Moheimani},
doi = {10.1115/DETC2015-46989},
year = {2015},
date = {2015-08-01},
booktitle = {ASME International Design Engineering Technical Conferences & Computers and Information in Engineering Conference},
pages = {V004T09A009},
address = {Boston, Massachusetts, USA},
abstract = {Various Atomic Force Microscopy (AFM) modes have emerged which rely on the excitation and detection of multiple eigenmodes of the microcantilever. The conventional control loops employed in multifrequency AFM (MF-AFM) such as bimodal imaging where the fundamental mode is used to map the topography and a higher eigenmode is used to map sample material properties only focus on maintaining low bandwidth signals such as amplitude and/ or frequency shift. However, the ability to perform additional high bandwidth control of the quality (Q) factor of the participating modes is believed to be imperative to unfolding the full potential of these methods. This can be achieved by employing a multi-mode Q control approach utilizing positive position feedback. The controller exhibits remarkable performance in arbitrarily modifying the Q factor of multiple eigenmodes as well as guaranteed stability properties when used on flexible structures with collocated actuators and sensors. A controller design method based on pole placement optimization is proposed for setting an arbitrary on-resonance Q factor of the participating eigenmodes. Experimental results using bimodal AFM imaging on a two component polymer sample are presented.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Various Atomic Force Microscopy (AFM) modes have emerged which rely on the excitation and detection of multiple eigenmodes of the microcantilever. The conventional control loops employed in multifrequency AFM (MF-AFM) such as bimodal imaging where the fundamental mode is used to map the topography and a higher eigenmode is used to map sample material properties only focus on maintaining low bandwidth signals such as amplitude and/ or frequency shift. However, the ability to perform additional high bandwidth control of the quality (Q) factor of the participating modes is believed to be imperative to unfolding the full potential of these methods. This can be achieved by employing a multi-mode Q control approach utilizing positive position feedback. The controller exhibits remarkable performance in arbitrarily modifying the Q factor of multiple eigenmodes as well as guaranteed stability properties when used on flexible structures with collocated actuators and sensors. A controller design method based on pole placement optimization is proposed for setting an arbitrary on-resonance Q factor of the participating eigenmodes. Experimental results using bimodal AFM imaging on a two component polymer sample are presented. |
| 109. | 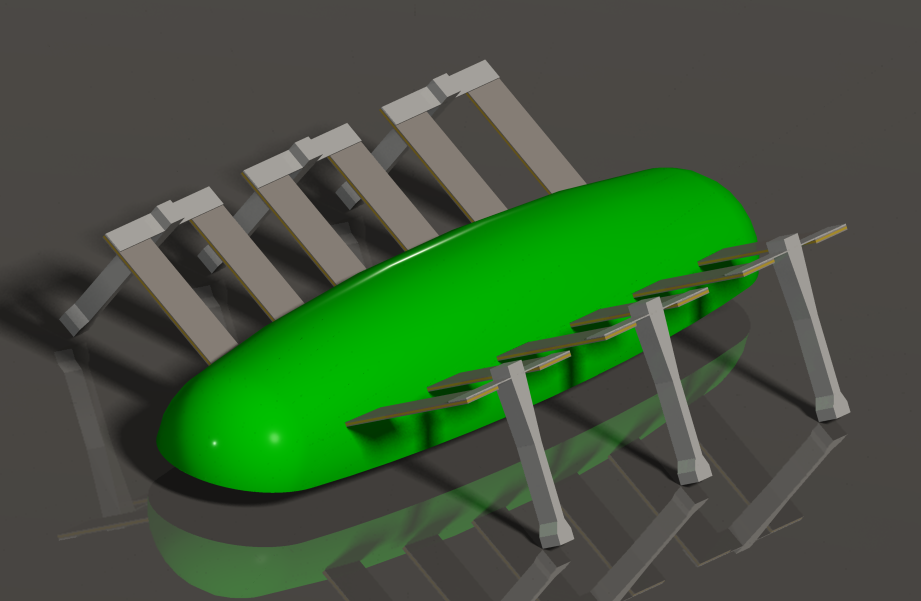 | S. A. Rios; A. J. Fleming; Y. K. Yong Design of a two degree of freedom resonant miniature robotic leg (Invited Paper) Proceedings Article In: IEEE Advanced Intelligent Mechatronics, Busan, Korea, 2015. @inproceedings{C15b,
title = {Design of a two degree of freedom resonant miniature robotic leg (Invited Paper)},
author = {S. A. Rios and A. J. Fleming and Y. K. Yong},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2015/05/Design-of-a-two-DoF-resonant-miniature-robotic-leg_DRAFT003.pdf},
year = {2015},
date = {2015-07-01},
booktitle = {IEEE Advanced Intelligent Mechatronics},
address = {Busan, Korea},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 108. |  | Y. K. Yong; S. O. R. Moheimani Control of vertical axis of a video-speed AFM nanopositioner (Invited Paper) Proceedings Article In: American Control Conference, Chicago, USA, pp. 3473-3477, 2015. @inproceedings{Yong20153473,
title = {Control of vertical axis of a video-speed AFM nanopositioner (Invited Paper)},
author = {Y. K. Yong and S. O. R. Moheimani},
year = {2015},
date = {2015-07-01},
booktitle = {American Control Conference, Chicago, USA},
journal = {Proceedings of the American Control Conference},
volume = {2015-July},
pages = {3473-3477},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 107. | 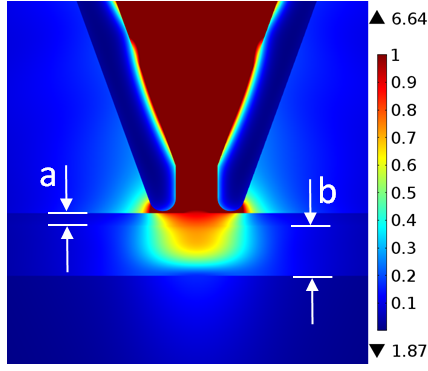 | B. S. Routley; J. L. Holdsworth; A. J. Fleming Optimization of near-field scanning optical lithography Proceedings Article In: Proc. SPIE Advanced Lithography, San Jose, CA, 2015. @inproceedings{D15a,
title = {Optimization of near-field scanning optical lithography},
author = {B. S. Routley and J. L. Holdsworth and A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2015/05/D15a.pdf},
year = {2015},
date = {2015-02-26},
booktitle = {Proc. SPIE Advanced Lithography},
address = {San Jose, CA},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
2014
|
| 106. | 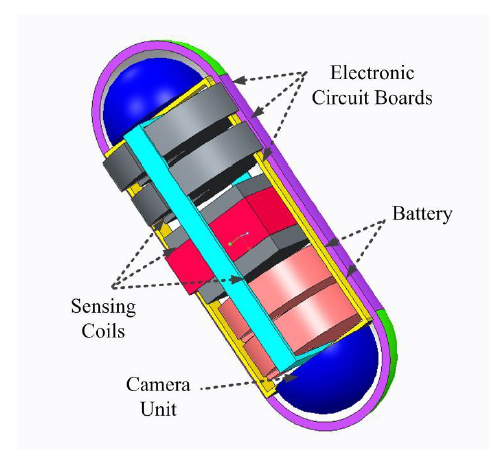 | M. N. Islam; A. J. Fleming A Novel and Compatible Sensing Coil for a Capsule in Wireless Capsule Endoscopy for Real Time Localization Proceedings Article In: IEEE Sensors, Valencia, Spain, 2014. @inproceedings{C14h,
title = {A Novel and Compatible Sensing Coil for a Capsule in Wireless Capsule Endoscopy for Real Time Localization},
author = {M. N. Islam and A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2015/05/C14h.pdf},
year = {2014},
date = {2014-11-02},
booktitle = {IEEE Sensors},
address = {Valencia, Spain},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 105. |  | D. Russell; A. J. Fleming; S. S. Aphale Improving the positioning bandwidth of the Integral Resonant Control Scheme through strategic zero placement Proceedings Article In: Proc. IFAC World Congress, Cape Town, South Africa, 2014. @inproceedings{C14e,
title = {Improving the positioning bandwidth of the Integral Resonant Control Scheme through strategic zero placement},
author = {D. Russell and A. J. Fleming and S. S. Aphale},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2015/05/C14e.pdf},
year = {2014},
date = {2014-09-01},
booktitle = {Proc. IFAC World Congress},
address = {Cape Town, South Africa},
crossref = {(Invited Session)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 104. | 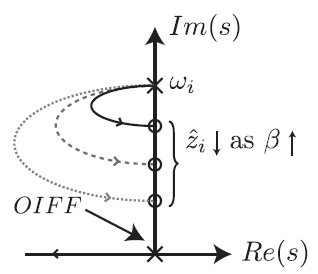 | Y. R. Teo; D. Russell; S. S. Aphale; A. J. Fleming Optimal Integral Force Feedback and Structured PI Tracking Control: Application for High Speed Confocal Microscopy Proceedings Article In: Proc. IFAC World Congress, Cape Town, South Africa, 2014. @inproceedings{C14d,
title = {Optimal Integral Force Feedback and Structured PI Tracking Control: Application for High Speed Confocal Microscopy},
author = {Y. R. Teo and D. Russell and S. S. Aphale and A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2015/05/C14d.pdf},
year = {2014},
date = {2014-09-01},
booktitle = {Proc. IFAC World Congress},
address = {Cape Town, South Africa},
crossref = {(Invited Session)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 103. | 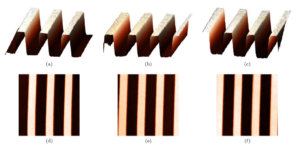 | M. G. Ruppert; S. O. R. Moheimani Novel Reciprocal Self-Sensing Techniques for Tapping-Mode Atomic Force Microscopy Proceedings Article In: 19th IFAC World Congress, Cape Town, South Africa, 2014. @inproceedings{Ruppert2014,
title = {Novel Reciprocal Self-Sensing Techniques for Tapping-Mode Atomic Force Microscopy},
author = {M. G. Ruppert and S. O. R. Moheimani},
doi = {https://doi.org/10.3182/20140824-6-ZA-1003.00376},
year = {2014},
date = {2014-08-24},
booktitle = {19th IFAC World Congress},
address = {Cape Town, South Africa},
abstract = {We evaluate two novel reciprocal self-sensing methods for tapping-mode atomic
force microscopy (TM-AFM) utilizing charge measurement and charge actuation, respectively.
A microcantilever, which can be batch fabricated through a standard microelectromechanical
system (MEMS) process, is coated with a single piezoelectric layer and simultaneously used for
actuation and deflection sensing. The setup enables the elimination of the optical beam deflection
technique which is commonly used to measure the cantilever oscillation amplitude. The voltage
to charge and charge to voltage transfer functions reveal a high amount of capacitive feedthrough
which degrades the dynamic range of the sensors significantly. A feedforward control technique
is employed to cancel the feedthrough and increase the dynamic range from less than 1 dB
to approximately 30 dB. Experiments show that the conditioned self-sensing schemes achieve
an excellent signal-to-noise ratio and can therefore be used to provide the feedback signal for
TM-AFM imaging.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
We evaluate two novel reciprocal self-sensing methods for tapping-mode atomic
force microscopy (TM-AFM) utilizing charge measurement and charge actuation, respectively.
A microcantilever, which can be batch fabricated through a standard microelectromechanical
system (MEMS) process, is coated with a single piezoelectric layer and simultaneously used for
actuation and deflection sensing. The setup enables the elimination of the optical beam deflection
technique which is commonly used to measure the cantilever oscillation amplitude. The voltage
to charge and charge to voltage transfer functions reveal a high amount of capacitive feedthrough
which degrades the dynamic range of the sensors significantly. A feedforward control technique
is employed to cancel the feedthrough and increase the dynamic range from less than 1 dB
to approximately 30 dB. Experiments show that the conditioned self-sensing schemes achieve
an excellent signal-to-noise ratio and can therefore be used to provide the feedback signal for
TM-AFM imaging. |
| 102. | 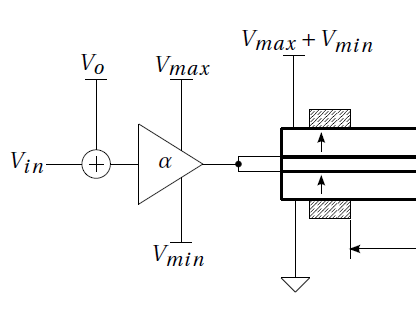 | S. A. Rios; A. J. Fleming A Novel Electrical Configuration for Three Wire Piezoelectric Bimorph Micro-Positioners Proceedings Article In: Proc. IEEE/ASME Advanced Intelligent Mechatronics, Besançon, France, 2014. @inproceedings{C14g,
title = {A Novel Electrical Configuration for Three Wire Piezoelectric Bimorph Micro-Positioners},
author = {S. A. Rios and A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2015/05/C14g.pdf},
year = {2014},
date = {2014-06-30},
booktitle = {Proc. IEEE/ASME Advanced Intelligent Mechatronics},
address = {Besançon, France},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 101. | 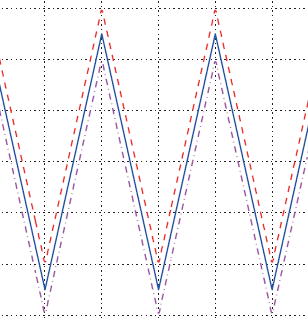 | Y. R. Teo; A. A. Eielsen; J. T. Gravdahl; A. J. Fleming Discrete-time repetitive control with model-less FIR filter inversion for high performance nanopositioning Proceedings Article In: Proc. IEEE/ASME Advanced Intelligent Mechatronics, Besançon, France, 2014. @inproceedings{C14f,
title = {Discrete-time repetitive control with model-less FIR filter inversion for high performance nanopositioning},
author = {Y. R. Teo and A. A. Eielsen and J. T. Gravdahl and A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2015/05/C14f1.pdf},
year = {2014},
date = {2014-06-30},
booktitle = {Proc. IEEE/ASME Advanced Intelligent Mechatronics},
address = {Besançon, France},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 100. | 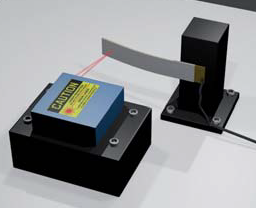 | S. A. Rios; A. J. Fleming Control of Piezoelectric Benders Using a Charge Drive Proceedings Article In: Proc. Actuator, Bremen, 2014. @inproceedings{D14a,
title = {Control of Piezoelectric Benders Using a Charge Drive},
author = {S. A. Rios and A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2015/05/D14a1.pdf},
year = {2014},
date = {2014-06-20},
booktitle = {Proc. Actuator},
address = {Bremen},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 99. |  | Y. R. Teo; A. J. Fleming Active Damping Control Using Optimal Integral Force Feedback Proceedings Article In: Proc. American Control Conference, Portland, Oregon, 2014. @inproceedings{C14c,
title = {Active Damping Control Using Optimal Integral Force Feedback},
author = {Y. R. Teo and A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2015/05/C14c.pdf},
year = {2014},
date = {2014-06-02},
booktitle = {Proc. American Control Conference},
address = {Portland, Oregon},
crossref = {(Invited Session)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 98. |  | Y. R. Teo; A. J. Fleming A New Repetitive Control Scheme Based on Non-Causal FIR Filters Proceedings Article In: Proc. American Control Conference, Portland, Oregon, 2014. @inproceedings{C14b,
title = {A New Repetitive Control Scheme Based on Non-Causal FIR Filters},
author = {Y. R. Teo and A. J. Fleming },
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2015/05/C14b1.pdf},
year = {2014},
date = {2014-06-02},
booktitle = {Proc. American Control Conference},
address = {Portland, Oregon},
crossref = {(Invited Session)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 97. |  | D. Russell; A. J. Fleming; S. S. Aphale Simultaneous Optimization of Damping and Tracking Controller Parameters via Selective Pole Placement for Enhanced positioning Bandwidth of Nanopositioners Proceedings Article In: Proc. American Control Conference, Portland, Oregon, 2014. @inproceedings{C14a,
title = {Simultaneous Optimization of Damping and Tracking Controller Parameters via Selective Pole Placement for Enhanced positioning Bandwidth of Nanopositioners},
author = {D. Russell and A. J. Fleming and S. S. Aphale},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2015/05/C14a1.pdf},
year = {2014},
date = {2014-06-02},
booktitle = {Proc. American Control Conference},
address = {Portland, Oregon},
crossref = {(Invited Session)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 96. |  | S. P. Wadikhaye; Y. K. Yong; S. O. R. Moheimani Design and characterisation of a serial-kinematic nanopositioner for high-speed AFM (Invited Paper) Proceedings Article In: IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Besancon, France, pp. 210-215, 2014. @inproceedings{Wadikhaye2014210,
title = {Design and characterisation of a serial-kinematic nanopositioner for high-speed AFM (Invited Paper)},
author = {S. P. Wadikhaye and Y. K. Yong and S. O. R. Moheimani},
doi = {10.1109/AIM.2014.6878080},
year = {2014},
date = {2014-01-01},
booktitle = {IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Besancon, France},
journal = {IEEE/ASME International Conference on Advanced Intelligent Mechatronics, AIM},
pages = {210-215},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
2013
|
| 95. | 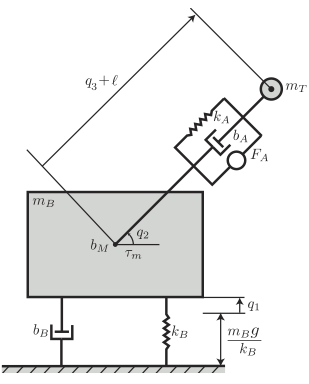 | Y. R. Teo; A. Donaire; T. Perez Regulation and integral control of an underactuated robotic system using IDA-PBC with dynamic extension Proceedings Article In: 2013 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), 2013. @inproceedings{Teo2013,
title = {Regulation and integral control of an underactuated robotic system using IDA-PBC with dynamic extension},
author = {Y. R. Teo and A. Donaire and T. Perez},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2015/08/06584211.pdf},
year = {2013},
date = {2013-07-09},
booktitle = {2013 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 94. |  | M. G. Ruppert; M. Fairbairn; S. O. R. Moheimani Multi-Mode Resonant Control of a Microcantilever for Atomic Force Microscopy Proceedings Article In: IEEE/ASME International Conference on Advanced Intelligent Mechatronics, pp. 77-82, Wollongong, Australia, 2013. @inproceedings{Ruppert2013,
title = {Multi-Mode Resonant Control of a Microcantilever for Atomic Force Microscopy},
author = {M. G. Ruppert and M. Fairbairn and S. O. R. Moheimani},
doi = {10.1109/AIM.2013.6584071},
year = {2013},
date = {2013-07-09},
booktitle = {IEEE/ASME International Conference on Advanced Intelligent Mechatronics},
pages = {77-82},
address = {Wollongong, Australia},
abstract = {When operating the Atomic Force Microscope in tapping mode it is possible to decrease the quality factor of the microcantilever to enhance scan speed. %Standard Q Control techniques involve velocity feedback with the disadvantage of additional sensor equipment, or time-delay position feedback which may lead to instabilities of out-of-bandwidth modes.Various resonance controllers have been proposed which do not rely on expensive velocity sensors and guarantee stability of the closed loop system even in the presence of unmodeled dynamics. A new field of Atomic Force Microscopy is evolving, which makes use of multiple frequency excitation and detection of the cantilever modes making it necessary to be able to control these modes and their response to excitation. This work proposes a multi-mode Q control approach utilizing positive position feedback, offering full control over the first two flexural modes of the cantilever. By completely damping the first mode and adjusting the quality factor of the second mode, it is possible to scan and obtain images at the second resonance frequency which improves image quality at high scan speeds due to the increased bandwidth of the z-axis feedback loop.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
When operating the Atomic Force Microscope in tapping mode it is possible to decrease the quality factor of the microcantilever to enhance scan speed. %Standard Q Control techniques involve velocity feedback with the disadvantage of additional sensor equipment, or time-delay position feedback which may lead to instabilities of out-of-bandwidth modes.Various resonance controllers have been proposed which do not rely on expensive velocity sensors and guarantee stability of the closed loop system even in the presence of unmodeled dynamics. A new field of Atomic Force Microscopy is evolving, which makes use of multiple frequency excitation and detection of the cantilever modes making it necessary to be able to control these modes and their response to excitation. This work proposes a multi-mode Q control approach utilizing positive position feedback, offering full control over the first two flexural modes of the cantilever. By completely damping the first mode and adjusting the quality factor of the second mode, it is possible to scan and obtain images at the second resonance frequency which improves image quality at high scan speeds due to the increased bandwidth of the z-axis feedback loop. |
| 93. | 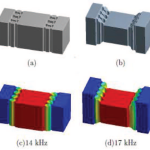 | S. P. Wadikhaye; Y. K. Yong; S. O. R. Moheimani Nanopositioner design using tapered flexures: A parametric study (Invited Paper) Proceedings Article In: IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Wollongong, Australia, pp. 856-861, 2013. @inproceedings{Wadikhaye2013856,
title = {Nanopositioner design using tapered flexures: A parametric study (Invited Paper)},
author = {S. P. Wadikhaye and Y. K. Yong and S. O. R. Moheimani},
doi = {10.1109/AIM.2013.6584201},
year = {2013},
date = {2013-07-01},
booktitle = {IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Wollongong, Australia},
journal = {2013 IEEE/ASME International Conference on Advanced Intelligent Mechatronics: Mechatronics for Human Wellbeing, AIM 2013},
pages = {856-861},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 92. | 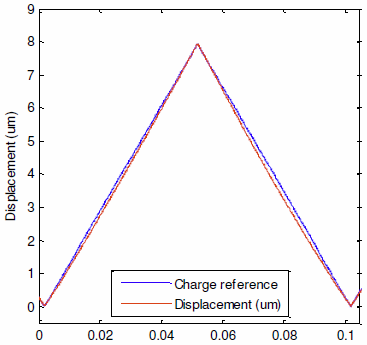 | A. J. Fleming Precision charge drive with low frequency voltage feedback for linearization of piezoelectric hysteresis Proceedings Article In: Proc. IEEE American Control Conference, Washington, DC, 2013. @inproceedings{C13a,
title = {Precision charge drive with low frequency voltage feedback for linearization of piezoelectric hysteresis},
author = {A. J. Fleming},
year = {2013},
date = {2013-01-01},
booktitle = {Proc. IEEE American Control Conference},
address = {Washington, DC},
crossref = {(Invited Session)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 91. | 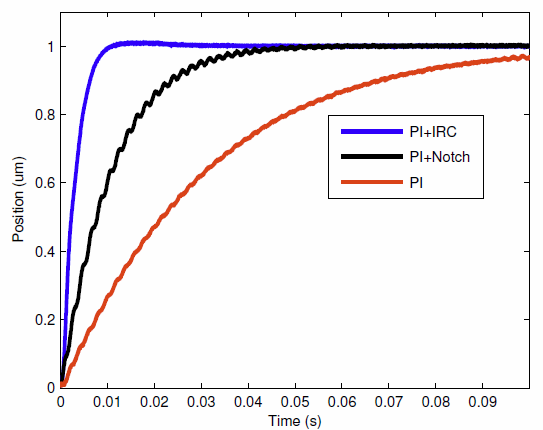 | A. J. Fleming; K. K. Leang An Experimental Comparison of PI, Inversion, and Damping Control for High Performance Nanopositioning Proceedings Article In: Proc. IEEE American Control Conference, Washington, DC, 2013. @inproceedings{C13b,
title = {An Experimental Comparison of PI, Inversion, and Damping Control for High Performance Nanopositioning},
author = {A. J. Fleming and K. K. Leang},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C13b.pdf},
year = {2013},
date = {2013-01-01},
booktitle = {Proc. IEEE American Control Conference},
address = {Washington, DC},
crossref = {(Invited Session)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 90. | 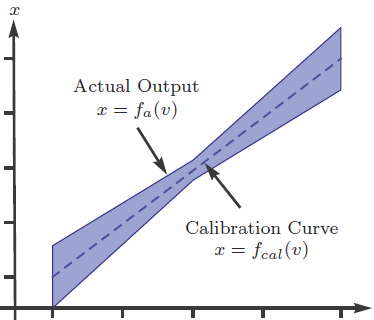 | A. J. Fleming Position Sensor Performance in Nanometer Resolution Feedback Systems Proceedings Article In: Proc. IFAC Symposium on Mechatronic Systems, Hangzhou, China, 2013. @inproceedings{C13c,
title = {Position Sensor Performance in Nanometer Resolution Feedback Systems},
author = {A. J. Fleming},
year = {2013},
date = {2013-01-01},
booktitle = {Proc. IFAC Symposium on Mechatronic Systems},
address = {Hangzhou, China},
crossref = {(Invited Session)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 89. | 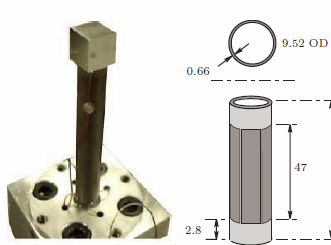 | A. J. Fleming Time domain resolution of nanopositioning systems Proceedings Article In: Proc. IFAC Symposium on Mechatronic Systems, Hangzhou, China, 2013. @inproceedings{C13d,
title = {Time domain resolution of nanopositioning systems},
author = {A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C13d.pdf},
year = {2013},
date = {2013-01-01},
booktitle = {Proc. IFAC Symposium on Mechatronic Systems},
address = {Hangzhou, China},
crossref = {(Invited Session)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 88. | 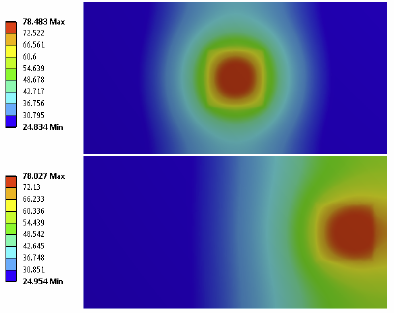 | A. J. Fleming; Y. K. Yong Thermal Analysis of Piezoelectric Benders with Laminated Power Electronics (Invited Paper) Proceedings Article In: Proc. IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Wollongong, Australia, 2013. @inproceedings{C13g,
title = {Thermal Analysis of Piezoelectric Benders with Laminated Power Electronics (Invited Paper)},
author = {A. J. Fleming and Y. K. Yong},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C13g.pdf},
year = {2013},
date = {2013-01-01},
booktitle = {Proc. IEEE/ASME International Conference on Advanced Intelligent Mechatronics},
address = {Wollongong, Australia},
crossref = {(Invited Session)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 87. | 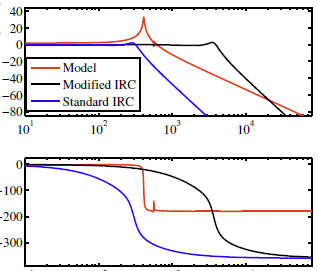 | M. Namavar; A. J. Fleming; S. S. Aphale Resonance-shifting Integral Resonant Control Scheme for Increasing the Positioning Bandwidth of nanopositioners Proceedings Article In: Proc. European Control Conference, Zurich, Switzerland, 2013. @inproceedings{C13f,
title = {Resonance-shifting Integral Resonant Control Scheme for Increasing the Positioning Bandwidth of nanopositioners},
author = {M. Namavar and A. J. Fleming and S. S. Aphale},
year = {2013},
date = {2013-01-01},
booktitle = {Proc. European Control Conference},
address = {Zurich, Switzerland},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 86. | 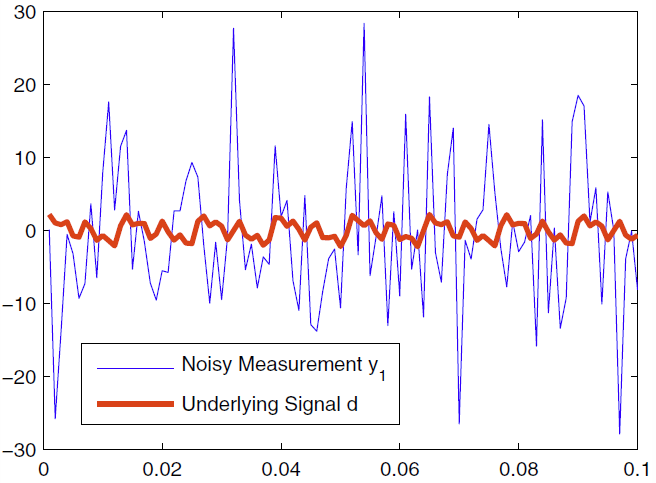 | A. J. Fleming; B. Ninness; A. G. Wills Spectral Estimation using Dual Sensors with Uncorrelated Noise Proceedings Article In: Proc. IEEE Sensors, Baltimore, MA, 2013. @inproceedings{C13h,
title = {Spectral Estimation using Dual Sensors with Uncorrelated Noise},
author = {A. J. Fleming and B. Ninness and A. G. Wills},
year = {2013},
date = {2013-01-01},
booktitle = {Proc. IEEE Sensors},
address = {Baltimore, MA},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 85. | 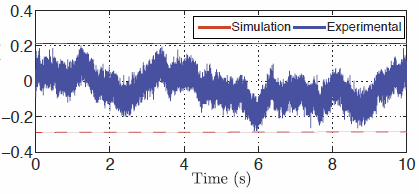 | Y. R. Teo; A. J. Fleming Resolution of Sensors with Capacitive Source Impedance Proceedings Article In: Proc. IEEE Sensors, Baltimore, MA, 2013. @inproceedings{C13j,
title = {Resolution of Sensors with Capacitive Source Impedance},
author = {Y. R. Teo and A. J. Fleming},
year = {2013},
date = {2013-01-01},
booktitle = {Proc. IEEE Sensors},
address = {Baltimore, MA},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 84. |  | Y. K. Yong; A. Bazaei; S. O. R. Moheimani Control of a high-speed nanopositioner for Lissajous-scan video-rate AFM Proceedings Article In: Australian Control Conference, Perth, Australia, pp. 171-176, 2013. @inproceedings{Yong2013171,
title = {Control of a high-speed nanopositioner for Lissajous-scan video-rate AFM},
author = {Y. K. Yong and A. Bazaei and S. O. R. Moheimani},
doi = {10.1109/AUCC.2013.6697268},
year = {2013},
date = {2013-01-01},
booktitle = {Australian Control Conference, Perth, Australia},
journal = {2013 3rd Australian Control Conference, AUCC 2013},
pages = {171-176},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 83. |  | Y. K. Yong; A. G. Fowler; A. Mohammadi; S. O. R. Moheimani Control of a MEMS nanopositioner for atomic force microscopy (Invited Paper) Proceedings Article In: Proc. IFAC Symposium on Mehatronic Systems, Hangzhou, China, pp. 375-382, 2013. @inproceedings{Yong2013375,
title = {Control of a MEMS nanopositioner for atomic force microscopy (Invited Paper)},
author = {Y. K. Yong and A. G. Fowler and A. Mohammadi and S. O. R. Moheimani},
doi = {10.3182/20130410-3-CN-2034.00038},
year = {2013},
date = {2013-01-01},
booktitle = {Proc. IFAC Symposium on Mehatronic Systems, Hangzhou, China},
journal = {IFAC Proceedings Volumes (IFAC-PapersOnline)},
pages = {375-382},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
2012
|
| 82. | 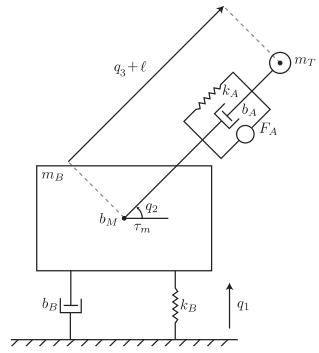 | C. Renton; Y. R. Teo; T. Perez Total energy shaping of a class of underactuated Port-Hamiltonian Systems using a new set of closed-loop potential shape variables. Proceedings Article In: 2012 IEEE 51st Annual Conference on Decision and Control (CDC), 2012. @inproceedings{Renton2012,
title = {Total energy shaping of a class of underactuated Port-Hamiltonian Systems using a new set of closed-loop potential shape variables.},
author = {C. Renton and Y. R. Teo and T. Perez},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2015/08/06426822.pdf},
year = {2012},
date = {2012-12-12},
booktitle = {2012 IEEE 51st Annual Conference on Decision and Control (CDC)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 81. | 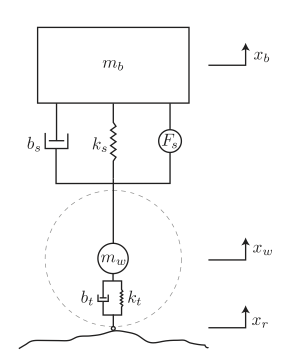 | C. Renton; Y. R. Teo; T. Perez Active control of car suspension systems using IDA-PBC Proceedings Article In: 2012 2nd Australian Control Conference (AUCC), 2012. @inproceedings{Renton2012b,
title = {Active control of car suspension systems using IDA-PBC},
author = {C. Renton and Y. R. Teo and T. Perez },
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2015/08/06613223.pdf},
year = {2012},
date = {2012-11-15},
booktitle = {2012 2nd Australian Control Conference (AUCC)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 80. | 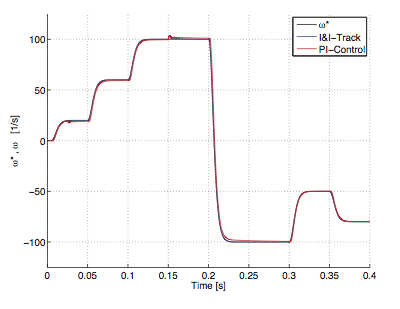 | A. Donaire; T. Perez; Y. R. Teo Robust speed tracking control of synchronous motors using immersion and invariance Proceedings Article In: 7th IEEE Conference on Industrial Electronics and Applications (ICIEA 2012), 2012. @inproceedings{Donaire2012,
title = {Robust speed tracking control of synchronous motors using immersion and invariance},
author = {A. Donaire and T. Perez and Y. R. Teo},
url = {https://www.precisionmechatronicslab.com/wp-content/uploads/2015/08/06360958.pdf},
year = {2012},
date = {2012-07-18},
booktitle = {7th IEEE Conference on Industrial Electronics and Applications (ICIEA 2012)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 79. |  | S. P. Wadikhaye; B. Bhikkaji; S. O. R. Moheimani; Y. K. Yong Analog implementation of a damping and tracking controller for a high-speed X-Y nanopositioner Proceedings Article In: American Control Conference, Montreal, Canada, pp. 3811-3816, 2012. @inproceedings{Wadikhaye20123811,
title = {Analog implementation of a damping and tracking controller for a high-speed X-Y nanopositioner},
author = {S. P. Wadikhaye and B. Bhikkaji and S. O. R. Moheimani and Y. K. Yong},
year = {2012},
date = {2012-06-01},
booktitle = {American Control Conference, Montreal, Canada},
journal = {Proceedings of the American Control Conference},
pages = {3811-3816},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 78. | 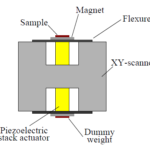 | Y. K. Yong; S. O. R. Moheimani A Z-scanner design for high-speed scanning probe microscopy (Invited Paper) Proceedings Article In: IEEE International Conference on Robotics and Automation, St. Paul, MN, USA, pp. 4780-4785, 2012. @inproceedings{Yong20124780,
title = {A Z-scanner design for high-speed scanning probe microscopy (Invited Paper)},
author = {Y. K. Yong and S. O. R. Moheimani},
doi = {10.1109/ICRA.2012.6224758},
year = {2012},
date = {2012-05-01},
booktitle = {IEEE International Conference on Robotics and Automation, St. Paul, MN, USA},
journal = {Proceedings - IEEE International Conference on Robotics and Automation},
pages = {4780-4785},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 77. | 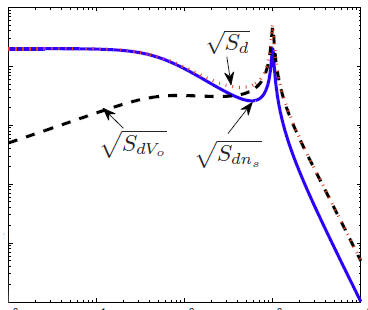 | A. J. Fleming Estimating the resolution of nanopositioning systems from frequency domain data Proceedings Article In: Proc. IEEE International Conference on Robotics and Automation, pp. 4786-4791, St. Paul, MN, 2012. @inproceedings{C12a,
title = {Estimating the resolution of nanopositioning systems from frequency domain data},
author = {A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C12a.pdf},
year = {2012},
date = {2012-01-01},
booktitle = {Proc. IEEE International Conference on Robotics and Automation},
pages = {4786-4791},
address = {St. Paul, MN},
crossref = {(Invited Session)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 76. | 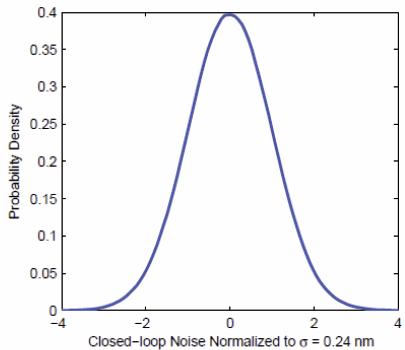 | A. J. Fleming Measuring picometer nanopositioner resolution Proceedings Article In: In Proc. Actuator, Bremen, 2012. @inproceedings{D12a,
title = {Measuring picometer nanopositioner resolution},
author = {A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/D12a.pdf},
year = {2012},
date = {2012-01-01},
booktitle = {In Proc. Actuator},
address = {Bremen},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 75. |  | Y. K. Yong; A. Bazaei; S. O. R. Moheimani; F. Allgower Design and control of a novel non-raster scan pattern for fast scanning probe microscopy (Invited Paper) Proceedings Article In: IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Kaohsiung, Taiwan, pp. 456-461, 2012. @inproceedings{Yong2012456,
title = {Design and control of a novel non-raster scan pattern for fast scanning probe microscopy (Invited Paper)},
author = {Y. K. Yong and A. Bazaei and S. O. R. Moheimani and F. Allgower},
doi = {10.1109/AIM.2012.6266062},
year = {2012},
date = {2012-01-01},
booktitle = {IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Kaohsiung, Taiwan},
journal = {IEEE/ASME International Conference on Advanced Intelligent Mechatronics, AIM},
pages = {456-461},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
2011
|
| 74. | 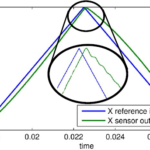 | S. P. Wadikhaye; Y. K. Yong; S. O. R. Moheimani A novel serial-kinematic AFM scanner: Design and characterization Proceedings Article In: Annual Conference of the IEEE Industrial Electronics Society, Melbourne, Australia, pp. 50-55, 2011. @inproceedings{Wadikhaye201150,
title = {A novel serial-kinematic AFM scanner: Design and characterization},
author = {S. P. Wadikhaye and Y. K. Yong and S. O. R. Moheimani},
doi = {10.1109/IECON.2011.6119287},
year = {2011},
date = {2011-11-01},
booktitle = {Annual Conference of the IEEE Industrial Electronics Society, Melbourne, Australia},
journal = {IECON Proceedings (Industrial Electronics Conference)},
pages = {50-55},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 73. | 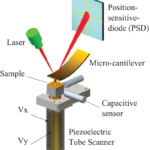 | B. Bhikkaji; Y. K. Yong; I. A. Mahmood; S. O. R. Moheimani Multivariable control designs for piezoelectric tubes (Invited Paper) Proceedings Article In: IFAC World Congress, Milan, Italy, pp. 2030-2035, 2011. @inproceedings{Bhikkaji20112030,
title = {Multivariable control designs for piezoelectric tubes (Invited Paper)},
author = {B. Bhikkaji and Y. K. Yong and I. A. Mahmood and S. O. R. Moheimani},
doi = {10.3182/20110828-6-IT-1002.01745},
year = {2011},
date = {2011-08-01},
booktitle = {IFAC World Congress, Milan, Italy},
journal = {IFAC Proceedings Volumes (IFAC-PapersOnline)},
volume = {18},
pages = {2030-2035},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 72. | 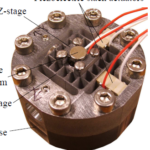 | Y. K. Yong; B. Bhikkaji; S. O. R. Moheimani Analog control of a high-speed atomic force microscope scanner Proceedings Article In: IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Budapest, Hungary., pp. 646-651, 2011. @inproceedings{Yong2011646,
title = {Analog control of a high-speed atomic force microscope scanner},
author = {Y. K. Yong and B. Bhikkaji and S. O. R. Moheimani},
doi = {10.1109/AIM.2011.6027103},
year = {2011},
date = {2011-07-01},
booktitle = {IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Budapest, Hungary.},
journal = {IEEE/ASME International Conference on Advanced Intelligent Mechatronics, AIM},
pages = {646-651},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 71. | | Y. K. Yong; S. O. R. Moheimani; I. R. Petersen A Non-raster Scan Method for High-speed SPM Proceedings Article In: IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Budapest, Hungary, 2011. @inproceedings{Yong2011,
title = {A Non-raster Scan Method for High-speed SPM},
author = {Y. K. Yong and S. O. R. Moheimani and I. R. Petersen },
year = {2011},
date = {2011-07-01},
booktitle = {IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Budapest, Hungary},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 70. | 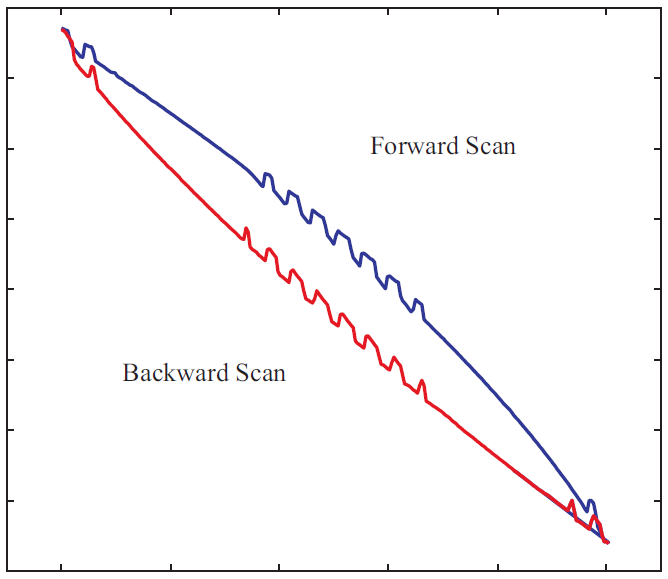 | A. J. Fleming A method for reducing piezoelectric non-linearity in scanning probe microscope images Proceedings Article In: Proc. American Control Conference, pp. 2861–2866, San Francisco, CA, 2011. @inproceedings{C11a,
title = {A method for reducing piezoelectric non-linearity in scanning probe microscope images},
author = {A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C11a.pdf},
year = {2011},
date = {2011-01-01},
booktitle = {Proc. American Control Conference},
pages = {2861--2866},
address = {San Francisco, CA},
crossref = {(Invited Session)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 69. | 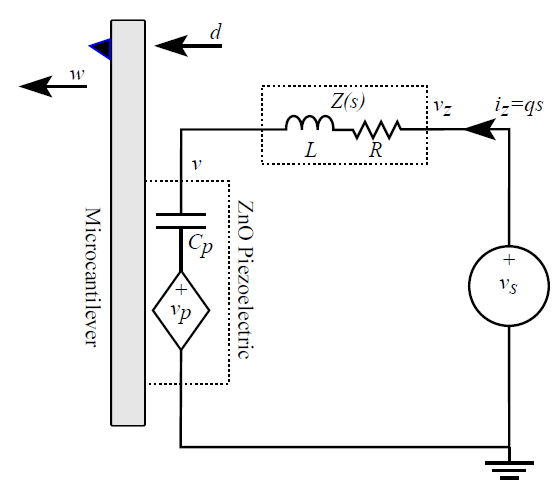 | M. Fairbairn; S. O. R. Moheimani; A. J. Fleming Passive piezoelectric shunt control of an atomic force microscope microcantilever Proceedings Article In: Proc. IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Budapest, Hungary, 2011. @inproceedings{C11b,
title = {Passive piezoelectric shunt control of an atomic force microscope microcantilever},
author = {M. Fairbairn and S. O. R. Moheimani and A. J. Fleming},
year = {2011},
date = {2011-01-01},
booktitle = {Proc. IEEE/ASME International Conference on Advanced Intelligent Mechatronics},
address = {Budapest, Hungary},
crossref = {(Invited Session)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 68. | 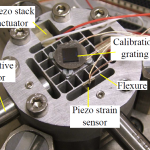 | Y. K. Yong; A. J. Fleming; S. O. R. Moheimani Vibration and tracking control of a flexure-guided nanopositioner using a piezoelectric strain sensor (Invited Paper) Proceedings Article In: Proc. International Conference on Manipulation, Manufacturing and Measurement on the Nanoscale, Changchun, China, 2011. @inproceedings{C11c,
title = {Vibration and tracking control of a flexure-guided nanopositioner using a piezoelectric strain sensor (Invited Paper)},
author = {Y. K. Yong and A. J. Fleming and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C11c.pdf},
year = {2011},
date = {2011-01-01},
booktitle = {Proc. International Conference on Manipulation, Manufacturing and Measurement on the Nanoscale},
address = {Changchun, China},
crossref = {(Invited Session)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 67. | 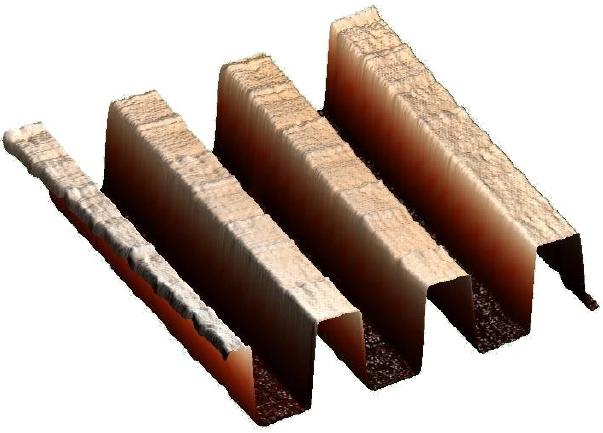 | M. Fairbairn; S. O. R. Moheimani; A. J. Fleming Improving the scan rate and image quality in tapping mode atomic force microscopy with piezoelectric shunt control Proceedings Article In: Proc. Australian Control Conference, Melbourne, Australia, 2011. @inproceedings{C11d,
title = {Improving the scan rate and image quality in tapping mode atomic force microscopy with piezoelectric shunt control},
author = {M. Fairbairn and S. O. R. Moheimani and A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C11d.pdf},
year = {2011},
date = {2011-01-01},
booktitle = {Proc. Australian Control Conference},
address = {Melbourne, Australia},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
2010
|
| 66. | | A. Bazaei; Y. K. Yong; S. O. R. Moheimani; A. Sebastian Tracking control of a novel AFM scanner using signal transformation method (Invited Paper) Proceedings Article In: Proc. IFAC Symposium on Mechatronic System, Cambridge, MA, USA, pp. 84-89, 2010. @inproceedings{Bazaei201084,
title = {Tracking control of a novel AFM scanner using signal transformation method (Invited Paper)},
author = {A. Bazaei and Y. K. Yong and S. O. R. Moheimani and A. Sebastian},
doi = {10.3182/20100913-3-US-2015.00021},
year = {2010},
date = {2010-09-01},
booktitle = {Proc. IFAC Symposium on Mechatronic System, Cambridge, MA, USA},
journal = {IFAC Proceedings Volumes (IFAC-PapersOnline)},
pages = {84-89},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 65. | 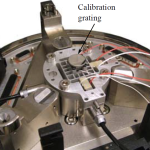 | Y. K. Yong; S. O. R. Moheimani A compact XYZ scanner for fast atomic force microscopy in constant force contact mode Proceedings Article In: IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Montreal, Canada, pp. 225-230, 2010. @inproceedings{Yong2010225,
title = {A compact XYZ scanner for fast atomic force microscopy in constant force contact mode},
author = {Y. K. Yong and S. O. R. Moheimani},
url = {http://www.eng.newcastle.edu.au/~yy582/Papers/Yong%202010%20-%20compact%20scanner.pdf},
doi = {10.1109/AIM.2010.5695880},
year = {2010},
date = {2010-07-01},
booktitle = {IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Montreal, Canada},
journal = {IEEE/ASME International Conference on Advanced Intelligent Mechatronics, AIM},
pages = {225-230},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 64. | | Y. K. Yong; B. Ahmed; S. O. R. Moheimani A 12-electrode piezoelectric tube scanner for fast atomic force microscopy (Invited Paper) Proceedings Article In: American Control Conference, Baltimore, Maryland, USA, pp. 4957-4962, 2010. @inproceedings{Yong20104957,
title = {A 12-electrode piezoelectric tube scanner for fast atomic force microscopy (Invited Paper)},
author = {Y. K. Yong and B. Ahmed and S. O. R. Moheimani},
year = {2010},
date = {2010-06-01},
booktitle = {American Control Conference, Baltimore, Maryland, USA},
journal = {Proceedings of the 2010 American Control Conference, ACC 2010},
pages = {4957-4962},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 63. | | A. J. Fleming High speed nanopositioning with force feedback Proceedings Article In: Proc. American Control Conference, pp. 4969–4974, Baltimore, MD, 2010. @inproceedings{C10a,
title = {High speed nanopositioning with force feedback},
author = {A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C10a.pdf},
year = {2010},
date = {2010-01-01},
booktitle = {Proc. American Control Conference},
pages = {4969--4974},
address = {Baltimore, MD},
crossref = {(Invited Session)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 62. | | A. J. Fleming Ultra-fast dual-stage vertical positioning for high performance SPMs Proceedings Article In: Proc. American Control Conference, pp. 4975–4980, Baltimore, MD, 2010. @inproceedings{C10b,
title = {Ultra-fast dual-stage vertical positioning for high performance SPMs},
author = {A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C10b.pdf},
year = {2010},
date = {2010-01-01},
booktitle = {Proc. American Control Conference},
pages = {4975--4980},
address = {Baltimore, MD},
crossref = {(Invited Session)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 61. | | A. A. Eielsen; A. J. Fleming Passive shunt damping of a piezoelectric stack nanopositioner Proceedings Article In: Proc. American Control Conference, pp. 4963–4968, Baltimore, MD, 2010. @inproceedings{C10c,
title = {Passive shunt damping of a piezoelectric stack nanopositioner},
author = {A. A. Eielsen and A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C10c.pdf},
year = {2010},
date = {2010-01-01},
booktitle = {Proc. American Control Conference},
pages = {4963--4968},
address = {Baltimore, MD},
crossref = {(Invited Session)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 60. | | S. Kuiper; A. J. Fleming; G. Schitter Dual actuation for high-speed atomic force microscopy Proceedings Article In: Proc. IFAC Symposium on Mechatronic Systems, pp. 220–226, Boston, MA, 2010. @inproceedings{C10d,
title = {Dual actuation for high-speed atomic force microscopy},
author = {S. Kuiper and A. J. Fleming and G. Schitter},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C10d.pdf},
year = {2010},
date = {2010-01-01},
booktitle = {Proc. IFAC Symposium on Mechatronic Systems},
pages = {220--226},
address = {Boston, MA},
crossref = {(Invited Session)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 59. | | A. J. Fleming; K. K. Leang High performance nanopositioning with integrated strain and force feedback Proceedings Article In: Proc. IFAC Symposium on Mechatronic Systems, pp. 117–124, Boston, MA, 2010. @inproceedings{C10e,
title = {High performance nanopositioning with integrated strain and force feedback},
author = {A. J. Fleming and K. K. Leang},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C10e.pdf},
year = {2010},
date = {2010-01-01},
booktitle = {Proc. IFAC Symposium on Mechatronic Systems},
pages = {117--124},
address = {Boston, MA},
crossref = {(Invited Session)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
2009
|
| 58. | | Y. K. Yong; T. F. Lu Comparison of circular flexure hinge design equations and the derivation of empirical stiffness formulations Proceedings Article In: IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Singapore, pp. 510-515, 2009. @inproceedings{Yong2009510,
title = {Comparison of circular flexure hinge design equations and the derivation of empirical stiffness formulations},
author = {Y. K. Yong and T. F. Lu},
doi = {10.1109/AIM.2009.5229961},
year = {2009},
date = {2009-07-01},
booktitle = {IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Singapore},
journal = {IEEE/ASME International Conference on Advanced Intelligent Mechatronics, AIM},
pages = {510-515},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 57. | | Y. K. Yong; S. O. R. Moheimani Vibration control of a novel tube scanner using piezoelectric strain-induced voltage Proceedings Article In: Proc. IEEE/ASME International Conference on Advanced Intelligent Mechatronics , 2009. @inproceedings{Yong20091070,
title = {Vibration control of a novel tube scanner using piezoelectric strain-induced voltage},
author = {Y. K. Yong and S. O. R. Moheimani},
doi = {10.1109/AIM.2009.5229728},
year = {2009},
date = {2009-07-01},
booktitle = {Proc. IEEE/ASME International Conference on Advanced Intelligent Mechatronics },
journal = {IEEE/ASME International Conference on Advanced Intelligent Mechatronics, AIM},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 56. | | A. J. Fleming; S. S. Aphale; S. O. R. Moheimani A new robust damping and tracking controller for SPM positioning stages Proceedings Article In: Proc. American Control Conference, St. Louis, MO, 2009. @inproceedings{C09a,
title = {A new robust damping and tracking controller for SPM positioning stages},
author = {A. J. Fleming and S. S. Aphale and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C09a.pdf},
year = {2009},
date = {2009-01-01},
booktitle = {Proc. American Control Conference},
address = {St. Louis, MO},
crossref = {(Invited Session)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 55. | | A. J. Fleming Time-domain adaptive feed-forward control of nanopositioning systems with periodic inputs Proceedings Article In: Proc. American Control Conference, St. Louis, MO, 2009. @inproceedings{C09b,
title = {Time-domain adaptive feed-forward control of nanopositioning systems with periodic inputs},
author = {A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C09b.pdf},
year = {2009},
date = {2009-01-01},
booktitle = {Proc. American Control Conference},
address = {St. Louis, MO},
crossref = {(Invited Session)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 54. | | A. J. Fleming High-speed vertical positioning for contact-mode atomic force microscopy Proceedings Article In: Proc. IEEE/ASME International Conference on Advanced Intelligent Mechatronics, pp. 522-527, Singapore, 2009. @inproceedings{C09c,
title = {High-speed vertical positioning for contact-mode atomic force microscopy},
author = {A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C09c.pdf},
year = {2009},
date = {2009-01-01},
booktitle = {Proc. IEEE/ASME International Conference on Advanced Intelligent Mechatronics},
pages = {522-527},
address = {Singapore},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 53. | | S. O. R. Moheimani; Y. K. Yong A new piezoelectric tube scanner for simultaneous sensing and actuation (Invited Paper) Proceedings Article In: American Control Conference, St. Louis, Missouri, USA, pp. 2249-2253, 2009. @inproceedings{RezaMoheimani20092249,
title = {A new piezoelectric tube scanner for simultaneous sensing and actuation (Invited Paper)},
author = {S. O. R. Moheimani and Y. K. Yong},
doi = {10.1109/ACC.2009.5160032},
year = {2009},
date = {2009-01-01},
booktitle = {American Control Conference, St. Louis, Missouri, USA},
journal = {Proceedings of the American Control Conference},
pages = {2249-2253},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
2008
|
| 52. | | Y. K. Yong; K. Liu; S. O. R. Moheimani H∞ control for reducing cross-coupling in a compliant XY nanopositioning stage Proceedings Article In: International Conference on Adaptive Structures and Technologies, Ascona, Switzerland., pp. 730-741, 2008. @inproceedings{Yong2008730,
title = {H∞ control for reducing cross-coupling in a compliant XY nanopositioning stage},
author = {Y. K. Yong and K. Liu and S. O. R. Moheimani},
year = {2008},
date = {2008-10-01},
booktitle = {International Conference on Adaptive Structures and Technologies, Ascona, Switzerland.},
journal = {19th International Conference on Adaptive Structures and Technologies 2008, ICAST 2008},
pages = {730-741},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 51. | | A. J. Fleming; K. K. Leang Evaluation of charge drives for scanning probe microscope positioning stages Proceedings Article In: Proc. American Control Conference, pp. 2028–2033, Seattle, WA, 2008. @inproceedings{C08a,
title = {Evaluation of charge drives for scanning probe microscope positioning stages},
author = {A. J. Fleming and K. K. Leang},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C08a.pdf},
year = {2008},
date = {2008-01-01},
booktitle = {Proc. American Control Conference},
pages = {2028--2033},
address = {Seattle, WA},
crossref = {(Invited Session)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 50. | | K. K. Leang; A. J. Fleming High-speed serial-kinematic AFM scanner: Design and drive considerations Proceedings Article In: Proc. American Control Conference, pp. 3188–3193, Seattle, WA, 2008. @inproceedings{C08b,
title = {High-speed serial-kinematic AFM scanner: Design and drive considerations},
author = {K. K. Leang and A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C08b.pdf},
year = {2008},
date = {2008-01-01},
booktitle = {Proc. American Control Conference},
pages = {3188--3193},
address = {Seattle, WA},
crossref = {(Invited Session)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 49. | | J. Maess; A. J. Fleming; F. Allgöwer Model-based vibration suppression in piezoelectric tube scanners through induced voltage feedback Proceedings Article In: Proc. American Control Conference, pp. 2022–2027, Seattle, WA, 2008. @inproceedings{C08c,
title = {Model-based vibration suppression in piezoelectric tube scanners through induced voltage feedback},
author = {J. Maess and A. J. Fleming and F. Allgöwer},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C08c.pdf},
year = {2008},
date = {2008-01-01},
booktitle = {Proc. American Control Conference},
pages = {2022--2027},
address = {Seattle, WA},
crossref = {(Invited Session)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 48. | | A. J. Fleming; A. G. Wills Optimal input signals for bandlimited scanning systems Proceedings Article In: Proc. IFAC World Congress, pp. 11805-11810, Seoul, Korea, 2008. @inproceedings{C08d,
title = {Optimal input signals for bandlimited scanning systems},
author = {A. J. Fleming and A. G. Wills},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C08d.pdf},
year = {2008},
date = {2008-01-01},
booktitle = {Proc. IFAC World Congress},
pages = {11805-11810},
address = {Seoul, Korea},
crossref = {(Invited Session)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 47. | | A. J. Fleming Techniques and considerations for driving piezoelectric actuators at high-speed Proceedings Article In: Proc. SPIE Smart Materials and Structures, San Diego, CA, 2008. @inproceedings{D08a,
title = {Techniques and considerations for driving piezoelectric actuators at high-speed},
author = {A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/D08a.pdf},
year = {2008},
date = {2008-01-01},
booktitle = {Proc. SPIE Smart Materials and Structures},
address = {San Diego, CA},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 46. | | S. S. Aphale; A. J. Fleming; S. O. R. Moheimani A second-order controller for resonance damping and tracking control of nanopositioning systems Proceedings Article In: Proc. 19th International Conference on Adaptive Structures and Technologies, Ascona, Switzerland, 2008. @inproceedings{D08b,
title = {A second-order controller for resonance damping and tracking control of nanopositioning systems},
author = {S. S. Aphale and A. J. Fleming and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/D08b.pdf},
year = {2008},
date = {2008-01-01},
booktitle = {Proc. 19th International Conference on Adaptive Structures and Technologies},
address = {Ascona, Switzerland},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 45. |  | Y. K. Yong; S. S. Aphale; S. O. R. Moheimani Design, analysis and control of a fast nanopositioning stage Proceedings Article In: IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Xi'an, China, pp. 451-456, 2008, (Finalist of the Best Conference Paper Award). @inproceedings{Yong2008451,
title = {Design, analysis and control of a fast nanopositioning stage},
author = {Y. K. Yong and S. S. Aphale and S. O. R. Moheimani},
doi = {10.1109/AIM.2008.4601703},
year = {2008},
date = {2008-01-01},
booktitle = {IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Xi'an, China},
journal = {IEEE/ASME International Conference on Advanced Intelligent Mechatronics, AIM},
pages = {451-456},
note = {Finalist of the Best Conference Paper Award},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
2007
|
| 44. | | A. J. Fleming; A. G. Wills; S. O. R. Moheimani Sensor fusion for improved control of piezoelectric tube scanners Proceedings Article In: Proc. IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Zurich, Switzerland, 2007. @inproceedings{C07a,
title = {Sensor fusion for improved control of piezoelectric tube scanners},
author = {A. J. Fleming and A. G. Wills and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C07a.pdf},
year = {2007},
date = {2007-01-01},
booktitle = {Proc. IEEE/ASME International Conference on Advanced Intelligent Mechatronics},
address = {Zurich, Switzerland},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 43. | | J. Maess; A. J. Fleming; F. Allgöwer Simulation of piezoelectric tube actuators by reduced finite element models for controller design Proceedings Article In: Proc. American Control Conference, New York, NY, 2007. @inproceedings{C07b,
title = {Simulation of piezoelectric tube actuators by reduced finite element models for controller design},
author = {J. Maess and A. J. Fleming and F. Allgöwer},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C07b.pdf},
year = {2007},
date = {2007-01-01},
booktitle = {Proc. American Control Conference},
address = {New York, NY},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 42. | | S. S. Aphale; S. O. R. Moheimani; A. J. Fleming Dominant resonant mode damping of a piezoelectric tube nanopositioner using optimal sensorless shunts Proceedings Article In: Proc. American Control Conference, New York, NY, 2007. @inproceedings{C07c,
title = {Dominant resonant mode damping of a piezoelectric tube nanopositioner using optimal sensorless shunts},
author = {S. S. Aphale and S. O. R. Moheimani and A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C07c.pdf},
year = {2007},
date = {2007-01-01},
booktitle = {Proc. American Control Conference},
address = {New York, NY},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 41. | | S. S. Aphale; A. J. Fleming; S. O. R. Moheimani Integral control of smart structures with collocated sensors and actuators Proceedings Article In: Proc. European Control Conference, Kos, Greece, 2007. @inproceedings{C07d,
title = {Integral control of smart structures with collocated sensors and actuators},
author = {S. S. Aphale and A. J. Fleming and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C07d.pdf},
year = {2007},
date = {2007-01-01},
booktitle = {Proc. European Control Conference},
address = {Kos, Greece},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 40. | | S. S. Aphale; A. J. Fleming; S. O. R. Moheimani Integral control of collocated smart structures Proceedings Article In: Proc. SPIE Smart Materials and Structures, San Diego, CA, 2007. @inproceedings{D07a,
title = {Integral control of collocated smart structures},
author = {S. S. Aphale and A. J. Fleming and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/D07a.pdf},
year = {2007},
date = {2007-01-01},
booktitle = {Proc. SPIE Smart Materials and Structures},
address = {San Diego, CA},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
2006
|
| 39. | | Y. K. Yong; T. F. Lu; J. Minase Trajectory following with a three-DOF micro-motion stage Proceedings Article In: Australasian Conference on Robotics and Automation, Auckland, New Zealand, 2006. @inproceedings{Yong2006,
title = {Trajectory following with a three-DOF micro-motion stage},
author = {Y. K. Yong and T. F. Lu and J. Minase},
year = {2006},
date = {2006-11-01},
booktitle = {Australasian Conference on Robotics and Automation, Auckland, New Zealand},
journal = {Proceedings of the 2006 Australasian Conference on Robotics and Automation, ACRA 2006},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 38. | | G. M. Clayton; S. Tien; S. Devasia; A. J. Fleming; S. O. R. Moheimani Hysteresis and vibration compensation in piezoelectric actuators by integrating charge control and inverse feedforward Proceedings Article In: Proc. IFAC Symposium on Mechatronic Systems, pp. 812-818, Heidelberg, Germany, 2006. @inproceedings{C06b,
title = {Hysteresis and vibration compensation in piezoelectric actuators by integrating charge control and inverse feedforward},
author = {G. M. Clayton and S. Tien and S. Devasia and A. J. Fleming and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C06b.pdf},
year = {2006},
date = {2006-01-01},
booktitle = {Proc. IFAC Symposium on Mechatronic Systems},
pages = {812-818},
address = {Heidelberg, Germany},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 37. | | B. Bhikkaji; M. Ratnam; A. J. Fleming; S. O. R. Moheimani High-performance control of a PZT Scanner Proceedings Article In: Proc. IFAC Symposium on Mechatronic Systems, Heidelberg, Germany, 2006. @inproceedings{C06c,
title = {High-performance control of a PZT Scanner},
author = {B. Bhikkaji and M. Ratnam and A. J. Fleming and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C06c.pdf},
year = {2006},
date = {2006-01-01},
booktitle = {Proc. IFAC Symposium on Mechatronic Systems},
address = {Heidelberg, Germany},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 36. | | S. S. Aphale; A. J. Fleming; S. O. R. Moheimani Optimal sensorless shunts for vibration damping of a piezoelectric tube nanopositioner Proceedings Article In: Proc. International Conference on Adaptive Structures and Technologies, Taipei, Taiwan, 2006. @inproceedings{C06d,
title = {Optimal sensorless shunts for vibration damping of a piezoelectric tube nanopositioner},
author = {S. S. Aphale and A. J. Fleming and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C06d.pdf},
year = {2006},
date = {2006-01-01},
booktitle = {Proc. International Conference on Adaptive Structures and Technologies},
address = {Taipei, Taiwan},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 35. | | A. J. Fleming; D. Niederberger; S. O. R. Moheimani; M. Morari Mitigation of acoustic resonance using electrically shunted loudspeakers Proceedings Article In: Proc. SPIE Symposium on Smart Structures & Materials -- Damping and Isolation, San Diego, CA, 2006. @inproceedings{D06a,
title = {Mitigation of acoustic resonance using electrically shunted loudspeakers},
author = {A. J. Fleming and D. Niederberger and S. O. R. Moheimani and M. Morari},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/D06a.pdf},
year = {2006},
date = {2006-01-01},
booktitle = {Proc. SPIE Symposium on Smart Structures & Materials -- Damping and Isolation},
address = {San Diego, CA},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
2005
|
| 34. | | A. J. Fleming; S. O. R. Moheimani Sensor-less vibration suppression and scan compensation for piezoelectric tube nanopositioners Proceedings Article In: Proc. IEEE Conference on Decision and Control and European Control Conference, Seville, Spain, 2005. @inproceedings{C05b,
title = {Sensor-less vibration suppression and scan compensation for piezoelectric tube nanopositioners},
author = {A. J. Fleming and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C05b.pdf},
year = {2005},
date = {2005-01-01},
booktitle = {Proc. IEEE Conference on Decision and Control and European Control Conference},
address = {Seville, Spain},
crossref = {(Invited Session)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 33. | | M. Ratnam; B. Bhikkaji; A. J. Fleming; S. O. R. Moheimani PPF control of a piezoelectric tube scanner Proceedings Article In: Proc. IEEE Conference on Decision and Control and European Control Conference, Seville, Spain, 2005. @inproceedings{C05c,
title = {PPF control of a piezoelectric tube scanner},
author = {M. Ratnam and B. Bhikkaji and A. J. Fleming and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C05c.pdf},
year = {2005},
date = {2005-01-01},
booktitle = {Proc. IEEE Conference on Decision and Control and European Control Conference},
address = {Seville, Spain},
crossref = {(Invited Session)},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 32. | | A. J. Fleming; S. O. R. Moheimani Proof-mass inertial vibration control using a shunted electromagnetic transducer Proceedings Article In: Proc. IFAC World Congress, Prague, Czech Republic, 2005. @inproceedings{C05a,
title = {Proof-mass inertial vibration control using a shunted electromagnetic transducer},
author = {A. J. Fleming and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C05a.pdf},
year = {2005},
date = {2005-01-01},
booktitle = {Proc. IFAC World Congress},
address = {Prague, Czech Republic},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 31. | | A. G. Wills; D. Bates; A. J. Fleming; B. Ninness; S. O. R. Moheimani Application of MPC to an active structure using sampling rates up to 25kHz Proceedings Article In: Proc. IEEE Conference on Decision and Control and European Control Conference, pp. 3176–3181, Seville, Spain, 2005. @inproceedings{C05d,
title = {Application of MPC to an active structure using sampling rates up to 25kHz},
author = {A. G. Wills and D. Bates and A. J. Fleming and B. Ninness and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C05d.pdf},
year = {2005},
date = {2005-01-01},
booktitle = {Proc. IEEE Conference on Decision and Control and European Control Conference},
pages = {3176--3181},
address = {Seville, Spain},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
2004
|
| 30. | | Y. K. Yong; T. F. Lu; D. C. Handley; P. Hu Kinematics of a 3RRR Compliant Micro-Motion Stage: Modelling Accuracy Improvement Proceedings Article In: International Symposium on Precision Mechanical Measurements, Beijing, China, 2004. @inproceedings{Yong2004,
title = {Kinematics of a 3RRR Compliant Micro-Motion Stage: Modelling Accuracy Improvement},
author = {Y. K. Yong and T. F. Lu and D. C. Handley and P. Hu },
year = {2004},
date = {2004-08-01},
booktitle = {International Symposium on Precision Mechanical Measurements, Beijing, China},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 29. | | D. Niederberger; A. J. Fleming; S. O. R. Moheimani; M. Morari Online-tuned multi-mode resonant piezoelectric shunt for broadband vibration suppression Proceedings Article In: Proc. IFAC Symposium on Mechatronic Systems, Sydney, Australia, 2004. @inproceedings{C04a,
title = {Online-tuned multi-mode resonant piezoelectric shunt for broadband vibration suppression},
author = {D. Niederberger and A. J. Fleming and S. O. R. Moheimani and M. Morari},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C04a.pdf},
year = {2004},
date = {2004-01-01},
booktitle = {Proc. IFAC Symposium on Mechatronic Systems},
address = {Sydney, Australia},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 28. | | A. J. Fleming; S. O. R. Moheimani Hybrid DC accurate charge amplifier for linear piezoelectric positioning Proceedings Article In: Proc. IFAC Symposium on Mechatronic Systems, Sydney, Australia, 2004. @inproceedings{C04b,
title = {Hybrid DC accurate charge amplifier for linear piezoelectric positioning},
author = {A. J. Fleming and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C04b.pdf},
year = {2004},
date = {2004-01-01},
booktitle = {Proc. IFAC Symposium on Mechatronic Systems},
address = {Sydney, Australia},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 27. | | A. J. Fleming; S. O. R. Moheimani Optimal impedance design for piezoelectric vibration control Proceedings Article In: Proc. IEEE Conference on Decision and Control, Bahamas, 2004. @inproceedings{C04c,
title = {Optimal impedance design for piezoelectric vibration control},
author = {A. J. Fleming and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C04c.pdf},
year = {2004},
date = {2004-01-01},
booktitle = {Proc. IEEE Conference on Decision and Control},
address = {Bahamas},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 26. | | S. Behrens; A. J. Fleming; S. O. R. Moheimani Control orientated synthesis of electromagnetic shunt impedances for vibration isolation Proceedings Article In: Proc. IFAC Symposium on Mechatronic Systems, Sydney, Australia, 2004. @inproceedings{C04d,
title = {Control orientated synthesis of electromagnetic shunt impedances for vibration isolation},
author = {S. Behrens and A. J. Fleming and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C04d.pdf},
year = {2004},
date = {2004-01-01},
booktitle = {Proc. IFAC Symposium on Mechatronic Systems},
address = {Sydney, Australia},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 25. | | S. Behrens; A. J. Fleming; S. O. R. Moheimani Negative inductor-resistor controller for electromagnetic shunt damping Proceedings Article In: Proc. IFAC Symposium on Mechatronic Systems, Sydney, Australia, 2004. @inproceedings{C04e,
title = {Negative inductor-resistor controller for electromagnetic shunt damping},
author = {S. Behrens and A. J. Fleming and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C04e.pdf},
year = {2004},
date = {2004-01-01},
booktitle = {Proc. IFAC Symposium on Mechatronic Systems},
address = {Sydney, Australia},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 24. | | S. Behrens; A. J. Fleming; S. O. R. Moheimani Vibration isolation using a shunted electromagnetic transducer Proceedings Article In: Proc. SPIE Symposium on Smart Structures & Materials -- Damping and Isolation, San Diego, CA, 2004. @inproceedings{D04a,
title = {Vibration isolation using a shunted electromagnetic transducer},
author = {S. Behrens and A. J. Fleming and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/D04a.pdf},
year = {2004},
date = {2004-01-01},
booktitle = {Proc. SPIE Symposium on Smart Structures & Materials -- Damping and Isolation},
address = {San Diego, CA},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 23. | | A. J. Fleming; S. O. R. Moheimani Synthesis of optimal piezoelectric shunt impedances for structural vibration control Proceedings Article In: Proc. SPIE Symposium on Smart Structures & Materials -- Damping and Isolation, San Diego, CA, 2004. @inproceedings{D04b,
title = {Synthesis of optimal piezoelectric shunt impedances for structural vibration control},
author = {A. J. Fleming and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/D04b.pdf},
year = {2004},
date = {2004-01-01},
booktitle = {Proc. SPIE Symposium on Smart Structures & Materials -- Damping and Isolation},
address = {San Diego, CA},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 22. | | D. C. Handley; T. F. Lu; Y. K. Yong; C. Eales Workspace investigation of a 3 DOF compliant micro-motion stage Proceedings Article In: International Conference on Control, Automation, Robotics and Vision, Kunming, China, pp. 1279-1284, 2004. @inproceedings{Handley20041279,
title = {Workspace investigation of a 3 DOF compliant micro-motion stage},
author = {D. C. Handley and T. F. Lu and Y. K. Yong and C. Eales},
year = {2004},
date = {2004-01-01},
booktitle = {International Conference on Control, Automation, Robotics and Vision, Kunming, China},
journal = {2004 8th International Conference on Control, Automation, Robotics and Vision (ICARCV)},
volume = {2},
pages = {1279-1284},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 21. | | T. F. Lu; D. C. Handley; Y. K. Yong Position control of a 3 DOF compliant micro-motion stage Proceedings Article In: International Conference on Control, Automation, Robotics and Vision, Kunming, China, pp. 1274-1278, 2004. @inproceedings{Lu20041274,
title = {Position control of a 3 DOF compliant micro-motion stage},
author = {T. F. Lu and D. C. Handley and Y. K. Yong},
year = {2004},
date = {2004-01-01},
booktitle = {International Conference on Control, Automation, Robotics and Vision, Kunming, China},
journal = {8th International Conference on Control, Automation, Robotics and Vision (ICARCV)},
volume = {2},
pages = {1274-1278},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
2003
|
| 20. | | Y. K. Yong; T. F. Lu; D. C. Handley Loop closure theory in deriving linear and simple kinematic model for a 3 DOF parallel micromanipulator Proceedings Article In: Proc. SPIE on Device and Process Technologies for MEMS, Microelectronics, and Photonics III, Perth, Australia, pp. 57-66, 2003. @inproceedings{Yong200457,
title = {Loop closure theory in deriving linear and simple kinematic model for a 3 DOF parallel micromanipulator},
author = {Y. K. Yong and T. F. Lu and D. C. Handley},
doi = {10.1117/12.522258},
year = {2003},
date = {2003-12-01},
booktitle = {Proc. SPIE on Device and Process Technologies for MEMS, Microelectronics, and Photonics III, Perth, Australia},
journal = {Proceedings of SPIE - The International Society for Optical Engineering},
volume = {5276},
pages = {57-66},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 19. | | A. J. Fleming; S. O. R. Moheimani Spatial system identification of a simply supported beam and a trapezoidal cantilever plate Proceedings Article In: Proc. IEEE Conference on Decision and Control, Las Vegas, NV, 2003. @inproceedings{C02c,
title = {Spatial system identification of a simply supported beam and a trapezoidal cantilever plate},
author = {A. J. Fleming and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C02c.pdf},
year = {2003},
date = {2003-09-01},
booktitle = {Proc. IEEE Conference on Decision and Control},
address = {Las Vegas, NV},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 18. | | A. J. Fleming; S. O. R. Moheimani Active H₂ and H[subscript infinity] shunt control of electromagnetic transducers Proceedings Article In: Proc. IEEE Conference on Decision and Control, Maui, HI, 2003. @inproceedings{C03a,
title = {Active H₂ and H[subscript infinity] shunt control of electromagnetic transducers},
author = {A. J. Fleming and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C03a.pdf},
year = {2003},
date = {2003-01-01},
booktitle = {Proc. IEEE Conference on Decision and Control},
address = {Maui, HI},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 17. | | S. Behrens; A. J. Fleming; S. O. R. Moheimani Electromagnetic shunt damping Proceedings Article In: Proc. IEEE/ASME Confernece on Advanced Intelligent Mechatronics, Kobe, Japan, 2003. @inproceedings{C03b,
title = {Electromagnetic shunt damping},
author = {S. Behrens and A. J. Fleming and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C03b.pdf},
year = {2003},
date = {2003-01-01},
booktitle = {Proc. IEEE/ASME Confernece on Advanced Intelligent Mechatronics},
address = {Kobe, Japan},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 16. | | A. J. Fleming; S. O. R. Moheimani An autonomous piezoelectric resonant shunt damping system Proceedings Article In: Proc. SPIE Symposium on Smart Structures & Materials -- Damping and Isolation, San Diego, CA, 2003. @inproceedings{D03a,
title = {An autonomous piezoelectric resonant shunt damping system},
author = {A. J. Fleming and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/D03a.pdf},
year = {2003},
date = {2003-01-01},
booktitle = {Proc. SPIE Symposium on Smart Structures & Materials -- Damping and Isolation},
address = {San Diego, CA},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 15. | | A. J. Fleming; S. O. R. Moheimani Improved current and charge amplifiers for driving piezoelectric loads Proceedings Article In: Proc. SPIE Symposium on Smart Structures & Materials -- Damping and Isolation, San Diego, CA, 2003. @inproceedings{D03b,
title = {Improved current and charge amplifiers for driving piezoelectric loads},
author = {A. J. Fleming and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/D03b.pdf},
year = {2003},
date = {2003-01-01},
booktitle = {Proc. SPIE Symposium on Smart Structures & Materials -- Damping and Isolation},
address = {San Diego, CA},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 14. | | S. Behrens; A. J. Fleming; S. O. R. Moheimani Robust piezoelectric passive shunt dampener Proceedings Article In: Proc. SPIE Symposium on Smart Structures & Materials -- Damping and Isolation, San Diego, CA, 2003. @inproceedings{D03c,
title = {Robust piezoelectric passive shunt dampener},
author = {S. Behrens and A. J. Fleming and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/D03c.pdf},
year = {2003},
date = {2003-01-01},
booktitle = {Proc. SPIE Symposium on Smart Structures & Materials -- Damping and Isolation},
address = {San Diego, CA},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 13. | | S. Behrens; A. J. Fleming; S. O. R. Moheimani Electrodynamic vibration suppression Proceedings Article In: Proc. SPIE Symposium on Smart Structures & Materials -- Damping and Isolation, San Diego, CA, 2003. @inproceedings{D03d,
title = {Electrodynamic vibration suppression},
author = {S. Behrens and A. J. Fleming and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/D03d.pdf},
year = {2003},
date = {2003-01-01},
booktitle = {Proc. SPIE Symposium on Smart Structures & Materials -- Damping and Isolation},
address = {San Diego, CA},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 12. | | D. C. Handley; T. F. Lu; Y. K. Yong; W. J. Zhang A simple and efficient dynamic modelling method for compliant micropositioning mechanisms using flexure hinges Proceedings Article In: Proc. SPIE on Device and Process Technologies for MEMS, Microelectronics, and Photonics III, Perth, Australia, pp. 67-76, 2003. @inproceedings{Handley200467,
title = {A simple and efficient dynamic modelling method for compliant micropositioning mechanisms using flexure hinges},
author = {D. C. Handley and T. F. Lu and Y. K. Yong and W. J. Zhang},
doi = {10.1117/12.523573},
year = {2003},
date = {2003-01-01},
booktitle = {Proc. SPIE on Device and Process Technologies for MEMS, Microelectronics, and Photonics III, Perth, Australia},
journal = {Proceedings of SPIE - The International Society for Optical Engineering},
volume = {5276},
pages = {67-76},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
2002
|
| 11. | | S. O. R. Moheimani; S. Behrens; A. J. Fleming Dynamics and stability of wideband vibration absorbers with multiple piezoelectric transducers Proceedings Article In: Proc. IFAC Symposium on Mechatronic Systems, Berkeley, CA, 2002. @inproceedings{C02b,
title = {Dynamics and stability of wideband vibration absorbers with multiple piezoelectric transducers},
author = {S. O. R. Moheimani and S. Behrens and A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C02b.pdf},
year = {2002},
date = {2002-12-01},
booktitle = {Proc. IFAC Symposium on Mechatronic Systems},
address = {Berkeley, CA},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 10. | | A. J. Fleming; S. O. R. Moheimani Power harvesting piezoelectric shunt damping Proceedings Article In: Proc. IFAC Symposium on Mechatronic Systems, Berkeley, CA, 2002. @inproceedings{C02d,
title = {Power harvesting piezoelectric shunt damping},
author = {A. J. Fleming and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C02d.pdf},
year = {2002},
date = {2002-12-01},
booktitle = {Proc. IFAC Symposium on Mechatronic Systems},
address = {Berkeley, CA},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 9. | | A. J. Fleming; S. O. R. Moheimani The effect of artificially reducing the size of inductor values in piezoelectric shunt damping circuits Proceedings Article In: Proc. IFAC Symposium on Mechatronic Systems, Berkeley, CA, 2002. @inproceedings{C02e,
title = {The effect of artificially reducing the size of inductor values in piezoelectric shunt damping circuits},
author = {A. J. Fleming and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C02e.pdf},
year = {2002},
date = {2002-12-01},
booktitle = {Proc. IFAC Symposium on Mechatronic Systems},
address = {Berkeley, CA},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 8. | | S. O. R. Moheimani; A. J. Fleming; S. Behrens On the feedback structure of wideband piezoelectric shunt damping systems Proceedings Article In: Proc. IFAC World Congress, Barcelona, Spain, 2002. @inproceedings{C02a,
title = {On the feedback structure of wideband piezoelectric shunt damping systems},
author = {S. O. R. Moheimani and A. J. Fleming and S. Behrens},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C02a.pdf},
year = {2002},
date = {2002-07-01},
booktitle = {Proc. IFAC World Congress},
address = {Barcelona, Spain},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 7. | | S. Behrens; S. O. R. Moheimani; A. J. Fleming Multiple mode passive piezoelectric shunt dampener Proceedings Article In: Proc. IFAC Symposium on Mechatronic Systems, Berkeley, CA, 2002. @inproceedings{C02f,
title = {Multiple mode passive piezoelectric shunt dampener},
author = {S. Behrens and S. O. R. Moheimani and A. J. Fleming},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C02f.pdf},
year = {2002},
date = {2002-01-01},
booktitle = {Proc. IFAC Symposium on Mechatronic Systems},
address = {Berkeley, CA},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 6. | | A. J. Fleming; S. O. R. Moheimani Adaptive piezoelectric shunt damping Proceedings Article In: Proc. SPIE Symposium on Smart Structures and Materials -- Industrial and Commercial Applications of Smart Structures Technologies, San Diego, CA, 2002. @inproceedings{D02a,
title = {Adaptive piezoelectric shunt damping},
author = {A. J. Fleming and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/D02a.pdf},
year = {2002},
date = {2002-01-01},
booktitle = {Proc. SPIE Symposium on Smart Structures and Materials -- Industrial and Commercial Applications of Smart Structures Technologies},
address = {San Diego, CA},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 5. | | S. Behrens; A. J. Fleming; S. O. R. Moheimani Series-parallel impedance structure for piezoelectric vibration damping Proceedings Article In: Proc. SPIE International Symposium on Smart Materials, Nano, and Micro-Smart Systems, Melbourne, Australia, 2002. @inproceedings{D02b,
title = {Series-parallel impedance structure for piezoelectric vibration damping},
author = {S. Behrens and A. J. Fleming and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/D02b.pdf},
year = {2002},
date = {2002-01-01},
booktitle = {Proc. SPIE International Symposium on Smart Materials, Nano, and Micro-Smart Systems},
address = {Melbourne, Australia},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
2001
|
| 4. | | S. Behrens; A. J. Fleming; S. O. R. Moheimani New method for multiple-mode shunt damping of structural vibration using a single piezoelectric transducer Proceedings Article In: Proc. SPIE International Symposium on Smart Structures -- Damping & Isolation, pp. 239–250, New Port Beach, CA, 2001. @inproceedings{D01a,
title = {New method for multiple-mode shunt damping of structural vibration using a single piezoelectric transducer},
author = {S. Behrens and A. J. Fleming and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/D01a.pdf},
year = {2001},
date = {2001-01-01},
booktitle = {Proc. SPIE International Symposium on Smart Structures -- Damping & Isolation},
pages = {239--250},
address = {New Port Beach, CA},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
2000
|
| 3. | | T. McKelvey; A. J. Fleming; S. O. R. Moheimani Subspace based system identification for an acoustic enclosure Proceedings Article In: Proc. IEEE International Conference on Control Applications & IEEE International Symposium on Computer-Aided Control Systems Design, Anchorage, Alaska, 2000. @inproceedings{C00a,
title = {Subspace based system identification for an acoustic enclosure},
author = {T. McKelvey and A. J. Fleming and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C00a.pdf},
year = {2000},
date = {2000-01-01},
booktitle = {Proc. IEEE International Conference on Control Applications & IEEE International Symposium on Computer-Aided Control Systems Design},
address = {Anchorage, Alaska},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 2. | | A. J. Fleming; S. Behrens; S. O. R. Moheimani A new approach to piezoelectric shunt damping Proceedings Article In: Proc. IS3M International Symposium on Smart Structures and Microsystems, Hong Kong, 2000. @inproceedings{C00b,
title = {A new approach to piezoelectric shunt damping},
author = {A. J. Fleming and S. Behrens and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/C00b.pdf},
year = {2000},
date = {2000-01-01},
booktitle = {Proc. IS3M International Symposium on Smart Structures and Microsystems},
address = {Hong Kong},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| 1. | | A. J. Fleming; S. Behrens; S. O. R. Moheimani Innovations in piezoelectric shunt damping Proceedings Article In: Proc. SPIE Symposium on Smart Materials and MEMs, Melbourne, Australia, 2000. @inproceedings{D00a,
title = {Innovations in piezoelectric shunt damping},
author = {A. J. Fleming and S. Behrens and S. O. R. Moheimani},
url = {https://www.precisionmechatronicslab.com/wp-content/publications/D00a.pdf},
year = {2000},
date = {2000-01-01},
booktitle = {Proc. SPIE Symposium on Smart Materials and MEMs},
address = {Melbourne, Australia},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
