
2023 |
||
| 10. | 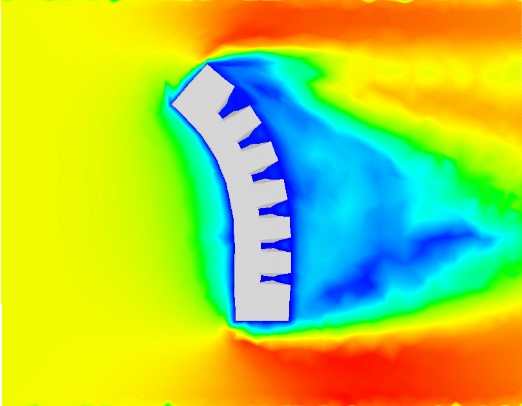 | M. S. Xavier; S. Harrison; D. Howard; Y. K. Yong; A. J. Fleming Modeling of soft fluidic actuators using fluid-structure interaction simulations with underwater applications Journal Article In: International Journal of Mechanical Sciences, vol. 255, iss. 108437, pp. 1-11, 2023, ISSN: 1879-2162. Abstract | Links | BibTeX | Tags: Finite element analysis, Fluid-structure interaction, Soft Robotics @article{J23a,Soft robots have been developed for a variety of applications including gripping, locomotion, wearables and medical devices. For the majority of soft robots, actuation is performed using pneumatics or hydraulics. Many previous works have addressed the modeling of these fluid-driven soft robots using static finite element simulations where the pressure inside the actuator is assumed to be constant and uniform. The assumption of constant internal pressure is a useful simplification but introduces significant errors during events such as pressurization, depressurization, and transient loads from a liquid environment. Applications that use soft actuators for locomotion or propulsion operate using a sequence of transient events, so accurate simulation of these events is critical to optimizing performance. To improve the simulation of soft fluidic actuators and enable the modeling of both internal and external fluid flow in underwater applications, this work describes a fully-coupled, three-dimensional fluid–structure interaction simulation approach, where the pressure and flow dynamics are explicitly solved. This approach provides a realistic simulation of soft actuators in fluid environments, and permits the optimization of transient responses, which may be due to a combination of environmental fluid loads and non-uniform pressurization. The proposed methods are demonstrated in a number of case studies and experiments for a range of actuation and both internal and external inlet flow configurations, including bending actuators, a soft robotic fish fin for propulsion, and experimental results of a bending actuator in a high-speed fluid, which correlate closely with simulations. The proposed approach is expected to assist in the design, modeling, and optimization of bioinspired soft robots in underwater applications. |
2022 |
||
| 9. | 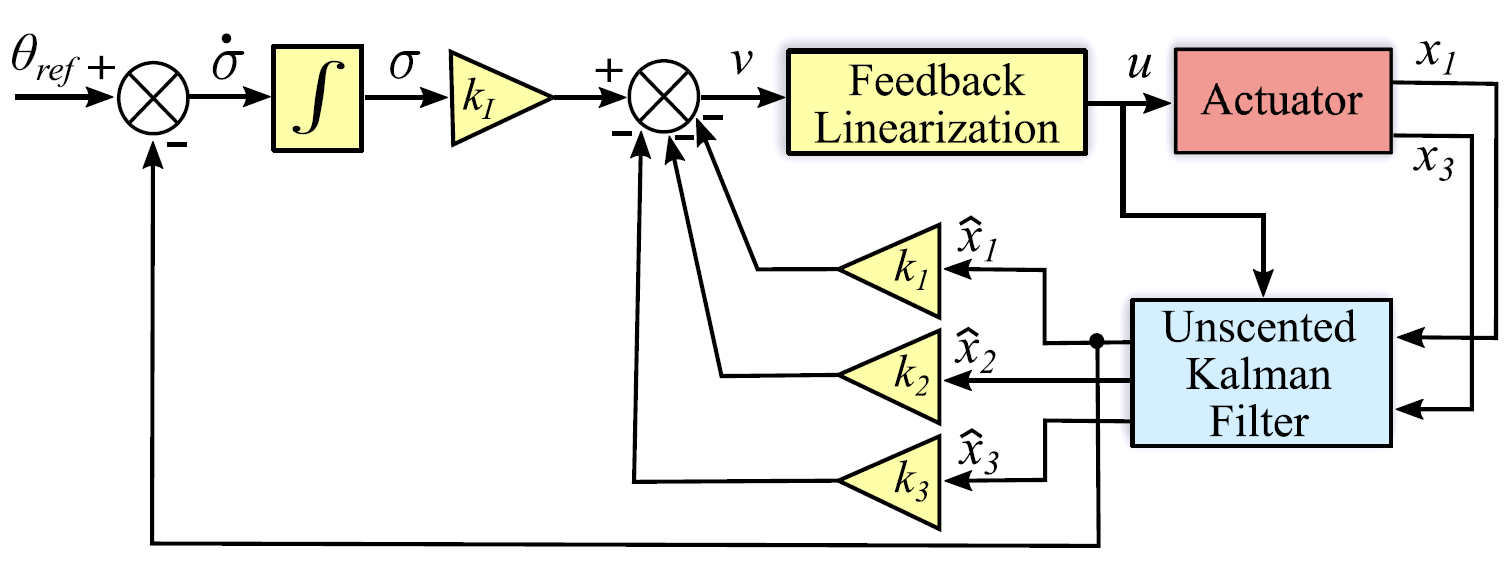 | M. S. Xavier; A. J. Fleming; Y. K. Yong Nonlinear Estimation and Control of Bending Soft Pneumatic Actuators Using Feedback Linearization and UKF Journal Article In: IEEE/ASME Transactions on Mechatronics, vol. 27, iss. 4, pp. 1919-1927, 2022, ISSN: 1083-4435. Abstract | Links | BibTeX | Tags: Soft Robotics @article{J22e,In this article, we combine nonlinear estimation and control methods for precise bending angle control in soft pneumatic actuators driven by a pressure source and single low-cost ON/OFF solenoid valve. First, a complete model for the soft actuator is derived, which includes both the motion and pressure dynamics. An unscented Kalman filter (UKF) is used to estimate the velocity state and filter noisy measurements from a pressure sensor and an embedded resistive flex sensor. Then, a feedback linearization approach is used with pole placement and linear quadratic regulator (LQR) controllers for bending angle control. To compensate for model uncertainties and improve reference tracking, integral action is incorporated to both controllers. The closed-loop performance of the nonlinear estimation and control approach is experimentally evaluated with a soft pneumatic network actuator. The simulation and experimental results show that the UKF provides accurate state estimation from noisy sensor measurements. The results demonstrate the effectiveness and robustness of the proposed observer-based nonlinear controllers for bending angle trajectory tracking. |
| 8. | 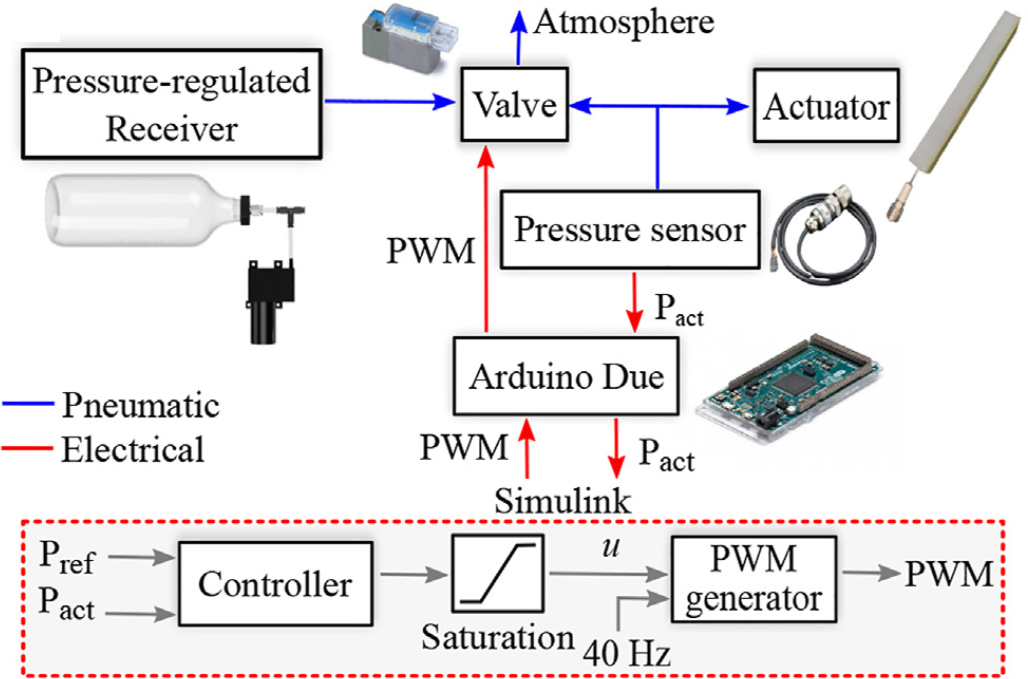 | M. S. Xavier; A. J. Fleming; Y. K. Yong Model-Based Nonlinear Feedback Controllers for Pressure Control of Soft Pneumatic Actuators Using On/Off Valves Journal Article In: Frontiers in Robotics and AI, vol. 9, 2022, ISSN: 2296-9144. Abstract | Links | BibTeX | Tags: Soft Robotics @article{J22d,This article describes the application and comparison of three nonlinear feedback controllers for low-level control of soft actuators driven by a pressure source and single high-speed on/off solenoid valve. First, a mathematical model of the pneumatic system is established and the limitations of the open-loop system are evaluated. Next, a model of the pneumatic system is developed using Simscape Fluids to evaluate the performance of various control strategies. In this article, State-Dependent Riccati Equation control, sliding mode control, and feedback linearization are considered. To improve robustness to model uncertainties, the sliding mode and feedback linearization control strategies are augmented with integral action. The model of the pneumatic system is also used to develop a feedforward component, which is added to a PI controller with anti-windup. The simulation and experimental results demonstrate the effectiveness of the proposed controllers for pressure tracking. |
2021 |
||
| 7. | 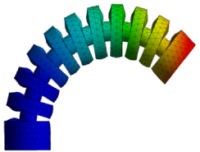 | M. S. Xavier; C. D. Tawk; Y. K. Yong; A. J. Fleming 3D-printed omnidirectional soft pneumatic actuators: Design, modeling and characterization Journal Article In: Sensors and Actuators: A. Physical , vol. 332, iss. 2, pp. 113199, 2021, ISSN: 0924-4247. Abstract | Links | BibTeX | Tags: Soft Robotics @article{Xavier2021,Soft pneumatic actuators are usually fabricated using molding and casting techniques with silicone rubbers, which requires intensive manual labor and limits repeatability and design flexibility for complex geometries. This article presents the design and direct 3D-printing of novel omnidirectional soft pneumatic actuators using stereolithography (SLA) with an elastic resin and fused deposition modeling (FDM) with a thermoplastic polyurethane (TPU). The actuator is modeled and optimized for bending performance using the finite element method along with a hyperelastic material model that is based on experimental uniaxial tensile data. The designs inspired by fast pneumatic network actuators (PneuNets) allow for multimodal actuation including bending, extension and contraction motions under positive, negative or differential pressures. The predicted results from the finite element method are compared with the experimental results for a range of actuation configurations. These novel omnidirectional actuators have significant potential in applications such as pipe inspection and biomedical devices. |
| 6. | 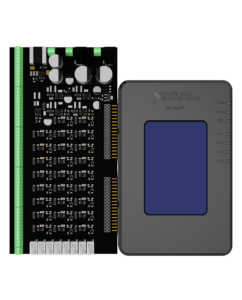 | T. R. Young; M. S. Xavier; Y. K. Yong; A. J. Fleming A Control and Drive System for Pneumatic Soft Robots: PneuSoRD Proceedings Article In: International Conference on Intelligent Robots and Systems, Prague, Czech Republic , 2021, ISSN: 2153-0866. Abstract | Links | BibTeX | Tags: Soft Robotics @inproceedings{Young2021,This article describes an open-source hardware platform for controlling pneumatic soft robotic systems and presents the comparison of control schemes with on-off and proportional valves. The Pneumatic Soft Robotics Driver (PneuSoRD) can be used with up to one pump and pressure accumulator, 26 on-off valves, and 5 proportional valves, any of which can be operated in open or closed-loop control using up to 12 sensor inputs, which allows for the simultaneous control of a large number of soft actuators. The electronic driver connects to a National Instruments myRIO controller or an Arduino Due with the use of an adapter shield. A library of pressure control algorithms in both LabVIEW and Simulink is provided that includes bang-bang control, hysteresis control and PID control using on-off or proportional valves. LabVIEW and Simulink provide user-friendly interfaces for rapid prototyping of control algorithms and real-time evaluation of pressure dynamics. The characteristics and performance of these control methods and pneumatic setups are evaluated to simplify the choice of valves and control algorithm for a given application. |
| 5. | 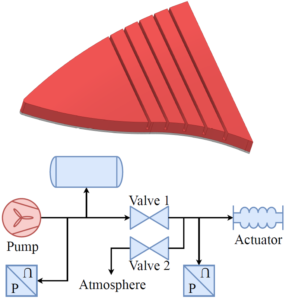 | M. S. Xavier; A. J. Fleming; Y. K. Yong Design and Control of Pneumatic Systems for Soft Robotics: a Simulation Approach Journal Article In: IEEE Robotics and Automation Letters, vol. 6, iss. 3, pp. 5800-5807, 2021, ISSN: 2377-3766. Abstract | Links | BibTeX | Tags: Soft Robotics @article{J21d,Pressure control plays a major role in the overall performance of fluid-driven soft robots. Due to the increasing demand for higher speed actuation and precision, a need exists for a practical design methodology that converts actuator performance specifications to a set of minimum pneumatic specifications, such as receiver volume and pressure, and valve conductance. This article presents a systematic parameter selection approach for pneumatic soft robotic systems by taking into consideration the desired closed-loop pressure responses. The two controllers under evaluation here are the PI controller with anti-windup and the on-off controller with hysteresis. Simulations are developed within Simscape Fluids to evaluate the effect of physical components and controller parameters on the actuator performance. The proposed parameter selection procedures are then applied on three soft actuators and their closed-loop pressure responses are experimentally evaluated. The measured pressure responses are in close agreement with the simulations and satisfy the rise time specifications. |
| 4. | 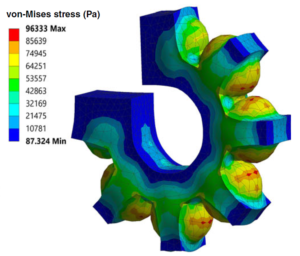 | M. S. Xavier; A. J. Fleming; Y. K. Yong Finite Element Modeling of Soft Fluidic Actuators: Overview and Recent Developments Journal Article In: Advanced Intelligent Systems, vol. 3, no. 2, pp. 2000187, 2021, ISBN: 2640-4567. Abstract | Links | BibTeX | Tags: Soft Robotics @article{J21b,Many soft robots are composed of soft fluidic actuators that are fabricated from silicone rubbers and use hydraulic or pneumatic actuation. The strong nonlinearities and complex geometries of soft actuators hinder the development of analytical models to describe their motion. Finite element modeling provides an effective solution to this issue and allows the user to predict performance and optimize soft actuator designs. Herein, the literature on a finite element analysis of soft actuators is reviewed. First, the required nonlinear elasticity concepts are introduced with a focus on the relevant models for soft robotics. In particular, the procedure for determining material constants for the hyperelastic models from material testing and curve fitting is explored. Then, a comprehensive review of constitutive model parameters for the most widely used silicone rubbers in the literature is provided. An overview of the procedure is provided for three commercially available software packages (Abaqus, Ansys, and COMSOL). The combination of modeling procedures, material properties, and design guidelines presented in this article can be used as a starting point for soft robotic actuator design. |
2020 |
||
| 3. | 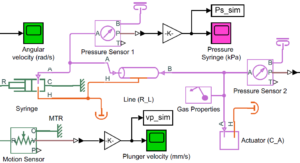 | M. S. Xavier; A. J. Fleming; Y. K. Yong Modelling and Simulation of Pneumatic Sources for Soft Robotic Applications Proceedings Article In: IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Boston, MA, 2020. Abstract | Links | BibTeX | Tags: Soft Robotics @inproceedings{C20b,The mathematical models for two widely used pneumatic systems in the soft robotics community are presented: syringe pumps and compressed air systems. These models enable prediction and optimisation of performance of soft actuators under pressurisation, allowing the user to select pneumatic components for a desired behaviour. Analytical models are confirmed with simulations developed using SimScape Fluids and SimScape Electrical within Simulink/MATLAB. By using a polytropic law, the models show agreement with the simulations with less than 10% discrepancy for the typical pressures used with soft actuators. Syringe pumps are shown to be much slower compared to the compressed air systems. In the latter, the addition of an air receiver allows very short actuation time. |
2019 |
||
| 2. | 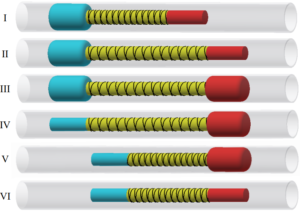 | M. S. Xavier; A. J. Fleming; Y. K. Yong Image-Guided Locomotion of a Pneumatic-Driven Peristaltic Soft Robot Proceedings Article In: IEEE International Conference on Robotics and Biomimetics, Dali, Yunnan, China, 2019, ISBN: 1-4244-0570-X. Abstract | Links | BibTeX | Tags: Soft Robotics @inproceedings{C19h,In this work, a pneumatic-driven peristaltic soft robot with pressure feedback control and image-guided tracking is developed. Locomotion is achieved in tube-like environments by mimicking the peristaltic motion of earthworms. The soft actuators are made of silicone rubber with 3D molding and fiber reinforcements. Pressure control is performed using custom made syringe pumps and on/off controllers in Arduino. Realtime visual tracking is accomplished in OpenCV with a colorbased approach. The soft robot has a stroke of 30-35mm for each cycle of actuation. This pneumatic soft robot shows great potential for application in minimally invasive surgery due to its compliance and biocompatibility. |
| 1. | 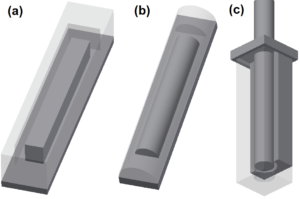 | M. S. Xavier; A. J. Fleming; Y. K. Yong Experimental Characterisation of Hydraulic Fiber-Reinforced Soft Actuators for Worm-Like Robots Proceedings Article In: International Conference on Control, Mechatronics and Automation, Delft, Netherlands, 2019, ISBN: 978-1-7281-3787-2. Abstract | Links | BibTeX | Tags: Soft Robotics @inproceedings{C19g,This article describes the design and fabrication of fiber-reinforced soft actuators for a snake-like robot designed to operate inside constrained tubes. The actuators include bending, extension and torsion. These actuators were experimentally characterised using water as the driving fluid with the aid of a water pressure sensor connected to Arduino and video recordings. It is shown that fiber wrapping, geometry of cross-section and elastomer selection are the main parameters affecting the levels of extension, bending and torsion of these actuators. Then, multi-material soft actuators are developed and used to present a soft robot capable of crawling a pipe, a mechanism that could be explored in steerable catheters,endoscopes and pipe inspection devices. |
2023 |
||
| 10. | | Modeling of soft fluidic actuators using fluid-structure interaction simulations with underwater applications Journal Article In: International Journal of Mechanical Sciences, vol. 255, iss. 108437, pp. 1-11, 2023, ISSN: 1879-2162. |
2022 |
||
| 9. | | Nonlinear Estimation and Control of Bending Soft Pneumatic Actuators Using Feedback Linearization and UKF Journal Article In: IEEE/ASME Transactions on Mechatronics, vol. 27, iss. 4, pp. 1919-1927, 2022, ISSN: 1083-4435. |
| 8. | | Model-Based Nonlinear Feedback Controllers for Pressure Control of Soft Pneumatic Actuators Using On/Off Valves Journal Article In: Frontiers in Robotics and AI, vol. 9, 2022, ISSN: 2296-9144. |
2021 |
||
| 7. | | 3D-printed omnidirectional soft pneumatic actuators: Design, modeling and characterization Journal Article In: Sensors and Actuators: A. Physical , vol. 332, iss. 2, pp. 113199, 2021, ISSN: 0924-4247. |
| 6. | | A Control and Drive System for Pneumatic Soft Robots: PneuSoRD Proceedings Article In: International Conference on Intelligent Robots and Systems, Prague, Czech Republic , 2021, ISSN: 2153-0866. |
| 5. | | Design and Control of Pneumatic Systems for Soft Robotics: a Simulation Approach Journal Article In: IEEE Robotics and Automation Letters, vol. 6, iss. 3, pp. 5800-5807, 2021, ISSN: 2377-3766. |
| 4. | | Finite Element Modeling of Soft Fluidic Actuators: Overview and Recent Developments Journal Article In: Advanced Intelligent Systems, vol. 3, no. 2, pp. 2000187, 2021, ISBN: 2640-4567. |
2020 |
||
| 3. | | Modelling and Simulation of Pneumatic Sources for Soft Robotic Applications Proceedings Article In: IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Boston, MA, 2020. |
2019 |
||
| 2. | | Image-Guided Locomotion of a Pneumatic-Driven Peristaltic Soft Robot Proceedings Article In: IEEE International Conference on Robotics and Biomimetics, Dali, Yunnan, China, 2019, ISBN: 1-4244-0570-X. |
| 1. | | Experimental Characterisation of Hydraulic Fiber-Reinforced Soft Actuators for Worm-Like Robots Proceedings Article In: International Conference on Control, Mechatronics and Automation, Delft, Netherlands, 2019, ISBN: 978-1-7281-3787-2. |